


注記: 先にアンテナを接続してから, 電源を入れてソフトウェアの設定とデバッグを開始します. アンテナ接続後, パラメータをリアルタイムで監視できます.
地上局 (DC10~30V電源)

空挺インターフェイスの説明

目次
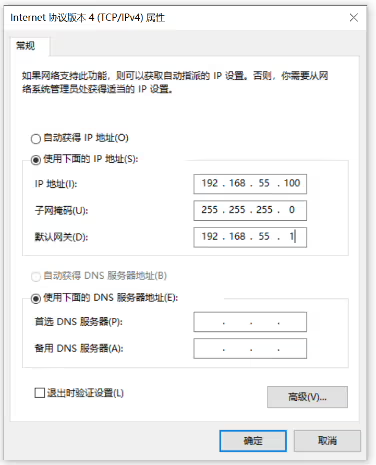
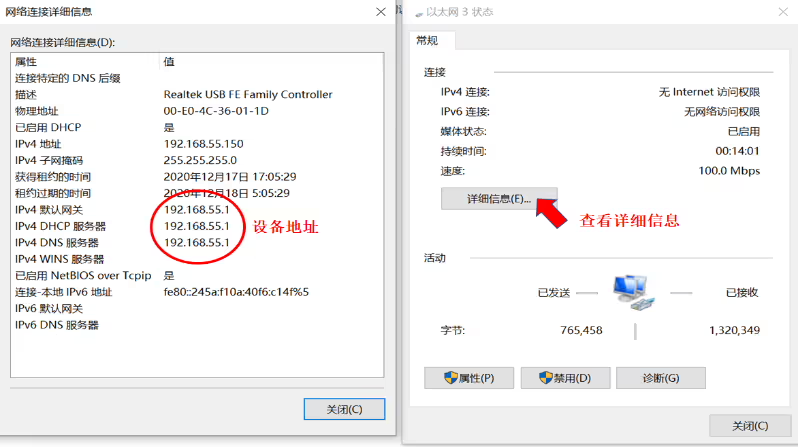
1. コンピューターの設定
デバイスをコンピュータに接続します, コンピュータのネットワーク接続内のデバイスの IP アドレスと、デバイス アドレスと同じネットワーク セグメントを確認します。 (写真の下). デバイスのコンピュータがわからない場合, IPを自動的に取得するようにコンピュータを設定できます, 次に、デバイスの IP アドレスのコンピュータ ネットワーク接続ステータスを確認します。, 次に、同じネットワークセグメント上に設定します, コンピュータの Windows ファイアウォールをオフにすることをお勧めします.

2. パラメータ設定ソフトウェアを実行する
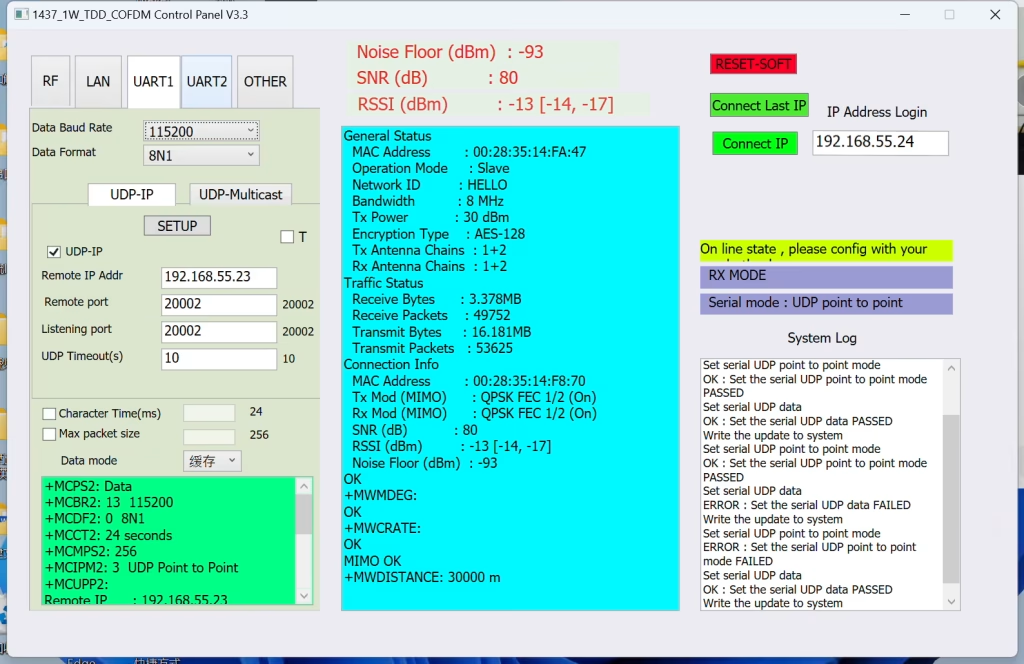
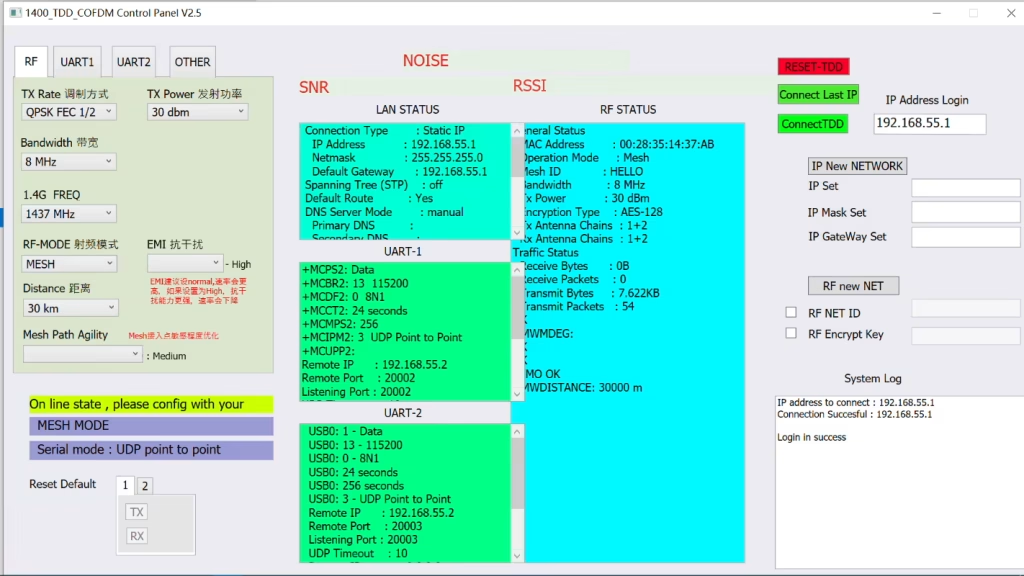
開封後、 1400_TDD_COFDM_ConfigV3.3 ソフトウェア, メインインターフェイスが表示されます:
2.1 デバイスの電源を入れてコンピュータに接続します
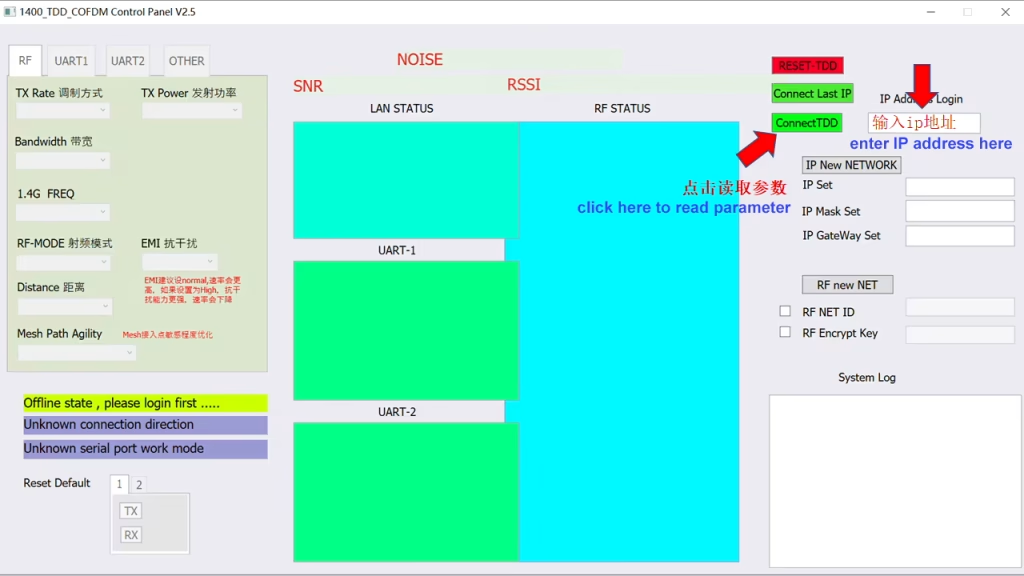
右側の [IP アドレス ログイン] ウィンドウにデバイスの IP アドレスを入力します。
ここで、ローカル デバイスの IP アドレスまたはリモート デバイスの IP を入力できます。. 複数のデバイスが正常に接続された後, 任意の端末のIPを使用可能.
「ConnectTDD」をクリックして接続します. または、直接「最後の IP を接続」をクリックしてすぐにログインします.
ログイン後にチャネルパラメータを読み取る
2.2 ログインとネットワークの設定
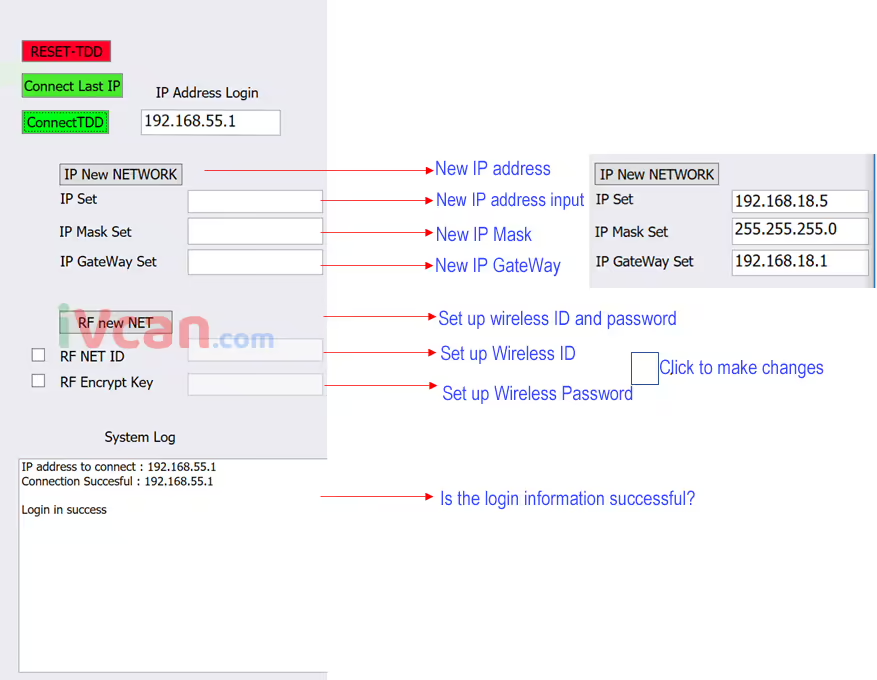
注記: 電源を入れてから起動するまでに3~5秒ほどかかります. クリック後 接続TDD,
| ログイン成功情報 | ログイン失敗情報 |
| 接続するIPアドレス : 192.168.55.1 | 警告 , 再度接続する必要はありません , システムは動作しています …. |
| 接続成功: 192.168.55.1 | 接続するIPアドレス : 192.168.55.1,デバイスが接続されていません |
| ログイン成功 |
赤いフォント REST-TDD, プログラムを再起動する
2.3 モニタリング情報
- パラメータを設定する前に, 周波数電磁環境を調べる必要があります. ノイズフロアが低いほど, より良い. 端末アクセス電界強度と信号対雑音比.
- パラメータが正常に設定された後, 対応する列に表示されます. 設定モードが正しいか確認できます.
- 接続の信号対雑音比を表示します, 信号強度 (antenna 1, antenna 2) そしてバックグラウンドノイズ。
- 周囲の騒音が大きすぎる場合, これは、干渉が深刻であり、周波数帯域を変更する必要があることを意味します。
- スペクトラム アナライザを持ち運んで、現場で干渉をテストできます。
- ここでのデータは 1 対 1 であることに注意してください, マスター/スレーブモードのデータ. 1対多またはMESHモードでの各端末の詳細データについて, RFステータス関連データを参照してください。.


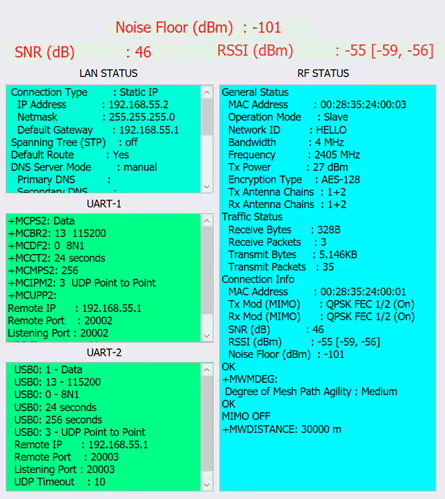
無線関連データの表示:

モード, ID番号, 帯域幅, 頻度, 電力とその他のデータ. 接続機器に関するデータ, デバイス番号, SNR, RSSI, ノイズフロアとその他のデータ.

- 接続の信号対雑音比を表示します, 信号強度 (antenna 1, antenna 2) そしてバックグラウンドノイズ。
- 周囲の騒音が大きすぎる場合, これは、干渉が深刻であり、周波数帯域を変更する必要があることを意味します。
- スペクトラム アナライザを持ち運んで、現場で干渉をテストできます。
- ここでのデータは 1 対 1 であることに注意してください, マスター/スレーブモードのデータ. 1対多またはMESHモードでの各端末の詳細データについて, RFステータス関連データを参照してください。.
3. パラメータ設定

ログイン後, デバイス関連のデータを表示および設定できます。
- 変調方式を設定する, 力, 帯域幅, 頻度, 距離, とモード.
- 変調帯域幅: 2, 4, 8メガヘルツ
- 周波数設定: 1430-1444
- 変調方式: BPSK FEC 1/2, QPSK FEC 1/2, QPSK FEC 3/4, 16-QAM 1/2, 16QAM 3/4, 64QAM 2/3, 64QAM 3/4, 64QAM 5/6, オート (通常は BPSK FEC に設定されます 1/2, 移動中のQPSK FEC 1/2)
- より高い変調方式を設定すると、より多くのデータ量が送信されます。, でも感度は低くなります. ホストが大量のデータを送信し、スレーブのデータ量が少ない場合, ホストは 16-QAM を設定できます, スレーブBPSK, そして非対称設定. データ量がわからない場合, AUTOに設定できる大きさ. 変調方式を指定した方が安定するかも知れません.
- 無線距離: 端子間の距離. この値は非常に重要です, 特に長距離伝送の場合. 対応する値を入力する必要があります. SNR およびその他のデータは正常だが、レートが低い場合, この値を増やすことができます.
- RFモード: マスター (ホスト) スレーブ (奴隷) このために (リレー) メッシュ (センターネットワークがない)
- マスタースレーブモード: 1 つのマスターが 1 つのスレーブに対応します (1対1モード) または、1 つのマスターが複数のスレーブに対応することもできます (1対多モード).
- アドホックモード: 1台のホストが複数のAD-HOCスレーブに対応. AD-HOC スレーブは相互に通信することもできます. MESHモードよりスタンバイ数が多い, MESH モードよりも遅延と送信データ量が少なくなります。.
- 1台のホストが複数のAD-HOCスレーブに対応, そして複数のスレーブに対応します, 混合ネットワークを形成する.
- メッシュモード: センターレス ネットワーキング, 複数のMESH端末ネットワーク (多対多モード)
- MESH パスの俊敏性: ネットワークパスの安定性の最適化, 高に設定できます; 中くらい; 低い,
- ネットワーク ノードが新しいネットワーク パスを発見したとき, パステーブルが各ノードで作成され、自動的に最適化されます。.
- しかし, ノードを追加または削減すると、いくつかの問題が発生します, のような: 接続を再確立し、パス テーブルを更新する必要があります, リンクが一時的に切断される場合があります.
- 一方では, リンク全体が元のリンクの安定性を維持する必要がある, そして一方で, 変化するネットワークに適応するにはパス テーブルを更新する必要がある. したがって, このパラメータは、新しいネットワークが追加された場合、または単一ネットワークの信号が弱い場合に使用されます。. パス更新パステーブルの感度. 通常はメディアが設定されます, 実際にはエンジニアリングの経験に基づいて設定されています. 内部パラメータは右側の RF STATUS に表示されます。.
- 狭帯域データ (シリアルポートデータ) 設定
UART設定ページ, ここで UART シリアル ポート関連データを設定します:

データボーレート: シリアルポートのボーレートを設定します, から 300 に 921600
COM1に設定するデータはこちら
データ形式: 8N1 8E1 8O1, 検証パラメータ
シリアルUDP-IP伝送モード: (このモードは1対1です, ユニキャストモード, ポイントツーポイント伝送に適しています)

- ボックスにチェックを入れて、対応する設定のパラメータを選択します
- リモートIPアドレス: 相手のIPアドレス (for example, 192.168.55.2)
- リモートポート: ポート番号 (以下に記入してください 20002, またはカスタマイズすることもできます)
- リスニングポート: ポート番号 (以下に記入してください 20002, またはカスタマイズすることもできます)
- UDP タイムアウト: タイムアウト (デフォルト値を入力します 10 下に)
- キャラクタータイムアウト: データタイムアウト (デフォルト値を入力します 24 後で)
- 最大パケットサイズ: データパケットサイズ (次のデフォルト値を入力します 256)
- 記入後, 「セットアップ」をクリックします。
- 関連する内部パラメータは右側のウィンドウに表示されます。 UART-1
シリアル UDP マルチキャスト送信モード: (1対多マルチキャストモード)
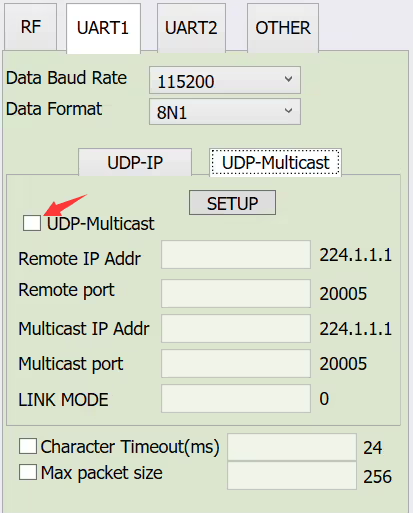
- ボックスにチェックを入れて、対応する設定のパラメータを選択します
- リモートIPアドレス: 受信用IPアドレス (リスニング) マルチキャスト
- リモートポート: 受信用ポート (リスニング) マルチキャスト
- マルチキャストIPアドレス: 送信用IPアドレス (リスニング) マルチキャスト
- マルチキャストポート: 送信用ポート (リスニング) マルチキャスト
- リンクモード: モード選択, 0 はデフォルト値です, 1 ブリッジモードです. デフォルト値をそのまま使用してください
- 注記: UART2の設定はUART1と同じです, 一部のマザーボードには UART2 がありません
- 本製品のシリアルポートデータをネットワークポートにロードして送信します。, シリアル ポートからネットワーク ポートへ、およびネットワーク ポートからシリアル ポートへのサポートをサポートします。.
質問する
ご回答をありがとうございました。 ✨