


ملحوظة: بعد توصيل الهوائي أولاً, قم بتشغيل الطاقة وابدأ تكوين البرنامج وتصحيح الأخطاء. بعد توصيل الهوائي, يمكن مراقبة المعلمات في الوقت الحقيقي.
محطة أرضية (مصدر طاقة تيار مستمر 10 ~ 30 فولت)

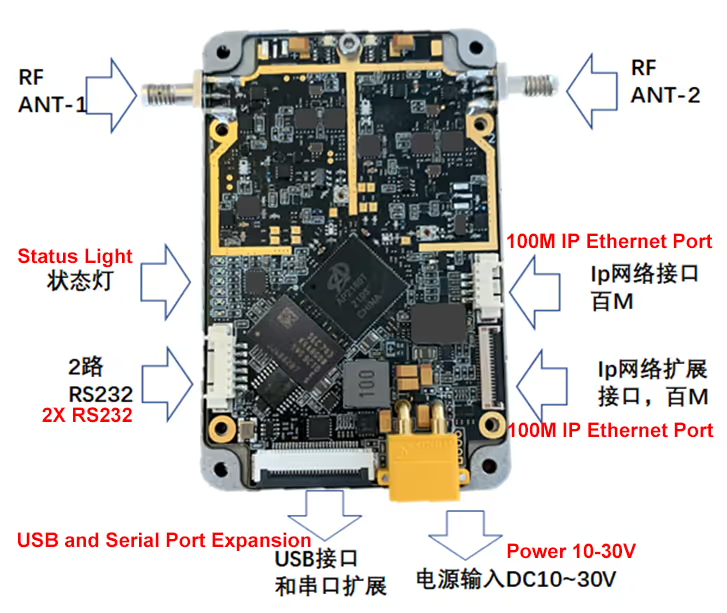
وصف الواجهة المحمولة جوا
جدول المحتويات
1. إعدادات الكمبيوتر
قم بتوصيل الجهاز بالكمبيوتر, تحقق من عنوان IP الخاص بالجهاز في اتصال شبكة الكمبيوتر ونفس مقطع الشبكة مثل عنوان الجهاز (الصور أدناه). إذا كنت لا تعرف جهاز الكمبيوتر, يمكنك ضبط الكمبيوتر للحصول على IP تلقائيًا, ثم تحقق من حالة اتصال شبكة الكمبيوتر لعنوان IP الخاص بالجهاز, ثم قم بتعيين على نفس قطعة الشبكة, فمن الأفضل إيقاف تشغيل جدار حماية Windows على أجهزة الكمبيوتر.



2. تشغيل برنامج تكوين المعلمة
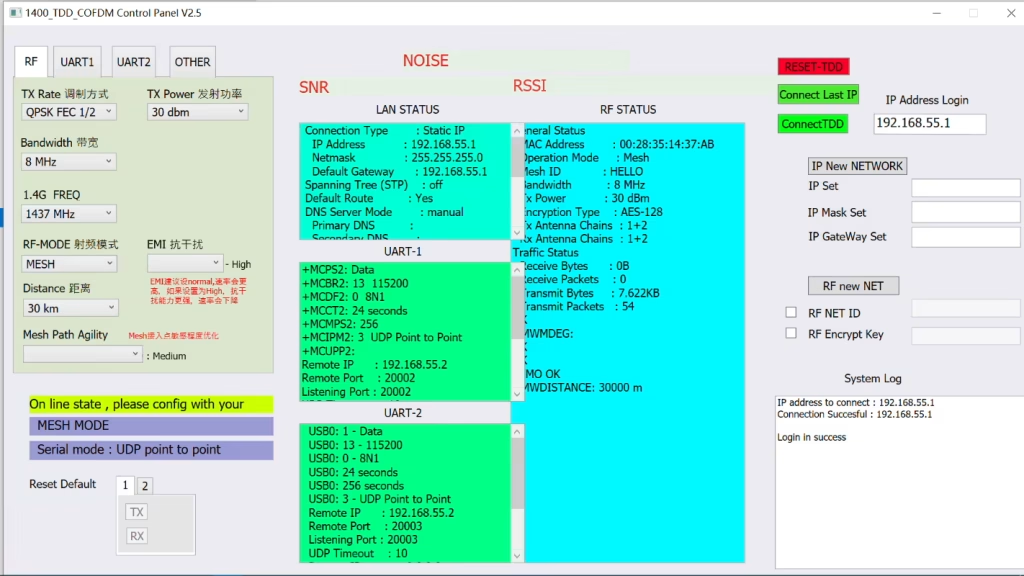
بعد فتح 1400_TDD_COFDM_ConfigV3.3 برمجة, تظهر الواجهة الرئيسية:
2.1 قم بتشغيل الجهاز وتوصيله بالكمبيوتر

أدخل عنوان IP الخاص بالجهاز في نافذة تسجيل الدخول إلى عنوان IP على اليمين.
هنا يمكنك إدخال عنوان IP الخاص بالجهاز المحلي أو IP الخاص بالجهاز البعيد. بعد توصيل أجهزة متعددة بنجاح, يمكن استخدام IP لأي محطة.
انقر فوق ConnectTDD للاتصال. أو انقر مباشرة على Connect last IP لتسجيل الدخول بسرعة.
قراءة معلمات القناة بعد تسجيل الدخول
2.2 إعدادات تسجيل الدخول والشبكة

ملحوظة: يستغرق تشغيل الجهاز حوالي 3 إلى 5 ثوانٍ بعد تشغيله. بعد النقر ConnectTDD,
| معلومات نجاح تسجيل الدخول | معلومات فشل تسجيل الدخول |
| عنوان IP للاتصال : 192.168.55.1 | تحذير , الآن لا حاجة للاتصال مرة أخرى , النظام يعمل …. |
| تم الاتصال بنجاح: 192.168.55.1 | عنوان IP للاتصال : 192.168.55.1,الجهاز غير متصل |
| تسجيل الدخول في النجاح |
الخط الأحمر ريست-تد, أعد تشغيل البرنامج
2.3 معلومات الرصد

- قبل تحديد المعلمات, تحتاج إلى إلقاء نظرة على بيئة التردد الكهرومغناطيسي. كلما انخفضت أرضية الضوضاء, كلما كان ذلك أفضل. شدة مجال الوصول إلى المحطة الطرفية ونسبة الإشارة إلى الضوضاء.
- بعد أن يتم ضبط المعلمات بنجاح, سيتم عرضها في العمود المقابل. يمكنك التحقق مما إذا كان وضع الإعداد صحيحًا.
- يعرض نسبة الإشارة إلى الضوضاء الخاصة بالاتصال, قوة الإشارة (هوائي 1, هوائي 2) والضوضاء الخلفية.
- إذا كانت الضوضاء الخلفية عالية جدًا, فهذا يعني أن التداخل خطير وتحتاج إلى تغيير نطاق التردد.
- يمكنك حمل محلل الطيف معك لاختبار التداخل في الموقع.
- لاحظ أن البيانات هنا هي واحد لواحد, البيانات في وضع السيد والعبد. للحصول على بيانات مفصلة عن كل محطة في وضع واحد إلى متعدد أو MESH, يرجى الرجوع إلى البيانات ذات الصلة بحالة RF.


عرض البيانات المتعلقة باللاسلكي:

وضع, رقم الهوية, عرض النطاق الترددي, تكرار, الطاقة وغيرها من البيانات. البيانات المتعلقة بالجهاز المتصل, رقم الجهاز, SNR, آر إس إس آي, الضوضاء الأرضية وغيرها من البيانات.

- يعرض نسبة الإشارة إلى الضوضاء الخاصة بالاتصال, قوة الإشارة (هوائي 1, هوائي 2) والضوضاء الخلفية.
- إذا كانت الضوضاء الخلفية عالية جدًا, فهذا يعني أن التداخل خطير وتحتاج إلى تغيير نطاق التردد.
- يمكنك حمل محلل الطيف معك لاختبار التداخل في الموقع.
- لاحظ أن البيانات هنا هي واحد لواحد, البيانات في وضع السيد والعبد. للحصول على بيانات مفصلة عن كل محطة في وضع واحد إلى متعدد أو MESH, يرجى الرجوع إلى البيانات ذات الصلة بحالة RF.
3. إعدادات المعلمة

بعد تسجيل الدخول, يمكنك عرض وتعيين البيانات المتعلقة بالجهاز.
- ضبط طريقة التعديل, قوة, عرض النطاق الترددي, تكرار, مسافة, والوضع.
- عرض النطاق الترددي التعديل: 2, 4, 8ميغاهيرتز
- إعداد التردد: 1430-1444
- طريقة التعديل: بي بي إس كيه إف إي سي 1/2, QPSK FEC 1/2, QPSK FEC 3/4, 16-QAM 1/2, 16QAM 3/4, 64QAM 2/3, 64QAM 3/4, 64QAM 5/6, آلي (يتم ضبطه عادةً على BPSK FEC 1/2, QPSK FEC أثناء الحركة 1/2)
- سيؤدي تعيين طريقة تعديل أعلى إلى نقل كمية أكبر من البيانات, ولكن الحساسية ستكون أقل. إذا أرسل المضيف كمية كبيرة من البيانات وكان لدى العبد كمية صغيرة من البيانات, يمكن للمضيف ضبط 16-QAM, العبد BPSK, والإعدادات غير المتماثلة. إذا كان مقدار البيانات غير معروف, كيف كبيرة يمكن ضبطها على AUTO. قد يكون أكثر استقرارًا إذا حددت طريقة التعديل.
- مسافة لاسلكية: المسافة بين المحطات. هذه القيمة مهمة جدا, خاصة بالنسبة للإرسال لمسافات طويلة. يجب ملء القيمة المقابلة. إذا كانت نسبة الإشارة إلى الضوضاء (SNR) والبيانات الأخرى طبيعية ولكن المعدل منخفض, يمكنك زيادة هذه القيمة.
- وضع الترددات اللاسلكية: يتقن (يستضيف) عبد (عبد) مخصصة (تتابع) شبكة (لا يوجد شبكة مركزية)
- وضع السيد والعبد: سيد واحد يتوافق مع عبد واحد (وضع واحد لواحد) أو يمكن لسيد واحد أن يتوافق مع عدة عبيد (وضع واحد لكثير).
- وضع مخصص: يتوافق مضيف واحد مع العديد من العبيد AD-HOC. يمكن لعبيد AD-HOC أيضًا التواصل مع بعضهم البعض. عدد الاستعدادات أكبر من عدد وضع MESH, والتأخير وكمية البيانات المرسلة أقل من وضع MESH.
- يتوافق مضيف واحد مع العديد من العبيد AD-HOC, ثم يتوافق مع العديد من العبيد, تشكيل شبكة مختلطة.
- وضع الشبكة: الشبكات بدون مركز, شبكات طرفية متعددة MESH (وضع كثير إلى كثير)
- MESH مسار أجيليتي: تحسين استقرار مسار الشبكة, يمكن ضبطها على مرتفع; واسطة; قليل,
- عندما تكتشف عقدة الشبكة مسارًا جديدًا للشبكة, سيتم إنشاء جدول مسار في كل عقدة وتحسينه تلقائيًا.
- لكن, إضافة أو تقليل العقد سوف يسبب بعض المشاكل, مثل: يجب إعادة تأسيس الاتصال وتحديث جدول المسار, وقد ينقطع الارتباط مؤقتًا.
- من ناحية, يحتاج الرابط بأكمله إلى الحفاظ على استقرار الرابط الأصلي, ومن ناحية أخرى, يحتاج جدول المسار إلى التحديث للتكيف مع الشبكة المتغيرة. لذلك, يتم استخدام هذه المعلمة عند إضافة شبكة جديدة أو عندما تكون إشارة شبكة واحدة ضعيفة. حساسية جدول مسار تحديث المسار. يتم تعيين المتوسطة بشكل عام, ويتم ضبطه فعليًا وفقًا للخبرة الهندسية. يمكن رؤية المعلمات الداخلية في حالة التردد اللاسلكي على اليمين.
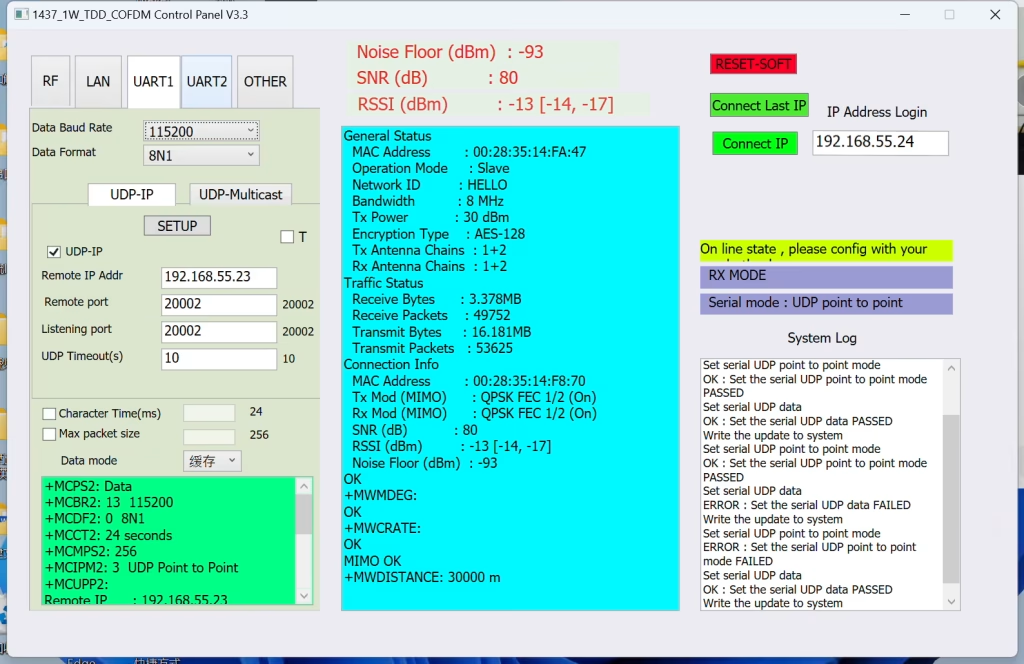
- بيانات النطاق الضيق (بيانات المنفذ التسلسلي) إعدادات
صفحة إعداد UART, قم بتعيين البيانات المتعلقة بمنفذ UART التسلسلي هنا:

معدل باود البيانات: ضبط معدل الباود للمنفذ التسلسلي, من 300 ل 921600
هنا هي البيانات لتعيين COM1
تنسيق البيانات: 8ن18ه18O1, معلمات التحقق
وضع نقل UDP-IP التسلسلي: (هذا الوضع هو واحد لواحد, وضع البث الأحادي, مناسبة للنقل من نقطة إلى نقطة)

- حدد المربع وحدد المعلمات للإعدادات المقابلة
- عنوان IP البعيد: عنوان IP الخاص بالطرف الآخر (على سبيل المثال, 192.168.55.2)
- المنفذ البعيد: رقم المنفذ (املأ ما يلي 20002, أو يمكنك تخصيصه)
- منفذ الاستماع: رقم المنفذ (املأ ما يلي 20002, أو يمكنك تخصيصه)
- مهلة UDP: نفذ الوقت (املأ القيمة الافتراضية 10 أقل)
- مهلة الأحرف: مهلة البيانات (املأ القيمة الافتراضية 24 لاحقاً)
- الحد الأقصى لحجم الحزمة: حجم حزمة البيانات (املأ القيمة الافتراضية التالية لـ 256)
- بعد ملء, انقر فوق الإعداد.
- يمكن الاطلاع على المعلمات الداخلية ذات الصلة في النافذة اليمنى UART-1
وضع الإرسال التسلسلي UDP-Multicast: (وضع البث المتعدد من واحد إلى عدة)

- حدد المربع وحدد المعلمات للإعدادات المقابلة
- عنوان IP البعيد: عنوان IP للاستلام (الاستماع) البث المتعدد
- المنفذ البعيد: منفذ للاستقبال (الاستماع) البث المتعدد
- عنوان IP للبث المتعدد: عنوان IP للإرسال (الاستماع) البث المتعدد
- منفذ البث المتعدد: منفذ للإرسال (الاستماع) البث المتعدد
- وضع الارتباط: اختيار الوضع, 0 هي القيمة الافتراضية, 1 هو وضع الجسر. فقط استخدم القيمة الافتراضية
- ملحوظة: إعدادات UART2 هي نفس إعدادات UART1, بعض اللوحات الأم لا تحتوي على UART2
- يتم تحميل بيانات المنفذ التسلسلي لهذا المنتج على منفذ الشبكة للإرسال, ويدعم المنفذ التسلسلي إلى منفذ الشبكة ومنفذ الشبكة إلى المنفذ التسلسلي.
اطرح سؤالاً
شكرًا لردكم ✨