


FHDビデオデータRC伝送システム
免責事項
- ご使用前に取扱説明書をよくお読みください. 必ず警告に注意し、すべての点を完全に理解してください.
- 地域の無線周波数管理規制を厳守してください。.
- この製品を使用するには、マニュアルのインストール手順に従ってください。. 当社および代理店は、お客様の設置・改造により生じた機器や人員の損害について、法的責任を負いません。.
- このマニュアルの著作権は VCAN Group Limited に属します 書面による同意なしに複製を行うことはできません.
注意
設置上の注意
1. 電源を入れる前に, アンテナ接続が確実に行われていることを確認してください . さもないと, デバイスに損傷を与える可能性があります.
2. 電圧が使用範囲内であることを確認してください.
3. ドローン上のすべての電子機器の EMC に注意してください。.
4. アンテナを下向きに設置し、アンテナをドローンの金属から離すことをお勧めします。.
5. 必ず適合するアンテナを使用してください.
ご使用の前に
1. すべてのケーブルが正しくしっかりと接続されていることを確認してください.
2. 異物がないこと (例えば. 液体, 砂, 等) デバイス内に入力できます.
3. かかる 15 デバイスが起動するまでの秒数. デバイスの起動が完了するまでビデオとデータは転送できません.
4. 機器が使用される環境に他の電磁干渉がないことを確認してください。.
5. 電波が弱まると, アンテナの向きを変えることで効果を高めることができます.
包装内容明細書
モジュール

付属品

概要
M50&M51, ドローン用に設計された , ワイヤレス FHD ビデオおよびデータ伝送システムの一種です. サイズが小さいという利点があります,低消費電力かつ長距離. システムは FHD ビデオを送信できます, 飛行制御データ, ジンバル制御データ, とRC制御データを同時に. H.265ビデオコーデックとOFDM変調技術を搭載, M50&M51 は低遅延を実現できます, 高解像度ビデオ伝送.
高度な高周波技術を搭載, M50&M51 は 3 つの周波数帯域をサポートできます. ユーザーは周波数帯域を簡単に変更できます. ユーザーは地域の規制に従って適切な周波数帯域を選択できます. 中国の無線型式承認 ID は 2019DP8189(CMIIT ID)です。:2019DP8189). 特別な条件下では周波数ホッピングまたは固定モードを選択することもできます.
M50のエアユニット&M51 システムはポイントツーポイント モードまたはリピーター モードに設定可能. ユーザーはもう 1 つの航空ユニットとシンプルな構成だけで長距離伝送を実現できます。. 詳細については説明ビデオをご覧ください.
M50&M51には暗号化機能が搭載されています. ユーザーは必要に応じてこの機能を有効/無効にすることができます. Maestro AssistantまたはWeb UIを使用して暗号化コードを簡単に設定できます.
デバイスには 2 つの UART (UART1 と UART2) があります。. 2つのプロトコル, Mavlink と透明, サポートされています. ユーザーは飛行制御データやジンバル制御データの送信に使用できます。. また、システムはSBUSポートを介してRC制御距離を向上させることができます. M50の地上ユニット上&M51, USBがあります 3.0 ポート. ユーザーは USB ストレージ デバイスを追加して FHD ビデオを保存できます.
M50&M51 はさまざまなビデオ入出力インターフェイスをサポートしています, HDMIなどの, Ethernet, SDI, CVBS . 市場のほとんどのジンバルにも適合します.
モデルの説明
M 5X H/S*:
Mはマエストロシリーズの略.
5X距離レベルコード*.
航空ユニットビデオインターフェースの H/S 表示.
*50 7kmを表します,51 17kmを表します,HはHDMIの略です,SはSDIの略です. ご注文時に適切なモデルをお知らせください.
例えば:7kmに立つM50H,航空ユニットのビデオインターフェイスはHDMI(HDMIとイーサネットの両方)。
特徴
長距離 変調
-LOSで最大17km– OFDM
ビデオインターフェース データインターフェース
-HDMI/イーサネット/SDI/CVBS – UART(TTL/RS232)/SBUS,
ホッピング/固定周波数 周波数帯域
-修理済み: ユーザー定義 – 800MHz/1.4GHz/2.4GHz,
-ホッピング: 自動 作業モード
BW – エアユニットは、 :ポイントツーポイントモード
-3/5/10/20 MHzリピータモード
コーデック ビデオビットレート
– H.265/H.264 – 500kbps~5Mbps
作業温度 パワーレンジ
– 40℃~+70℃ – DC9~28V バッテリー3S~6S
M51 インターフェースの説明
航空ユニット

1. 電源インジケーター
航空ユニットが起動しているとき、このインジケータは緑色に点灯します。.
航空ユニット起動時, HDMI にビデオ ソースが入力されていない場合、インジケーター ライトが 1 秒に 1 回点滅します。. ビデオソースがある場合、インジケーターライトが緑色に点灯します。.
2. リンクインジケーター
| LED パターンの説明 |
| 緑色に点灯 ワイヤレスリンクが確立されています |
| 消灯 無線リンクが失われました |
3. ステータスインジケーター
| LEDパターン(起動時のみ点滅) 説明 |
| まばたき 3 回 初期化OK, 周波数は 2.4GBlink 2 回 初期化OK, 周波数は 1.4GBlink 1 時間 初期化OK, 周波数は800Mです |
| 緑色に点灯 エアユニット異常 |
4. RSSIインジケーター
| LED パターンの説明 |
| 3 緑色に点灯 無線信号が最も強い |
| 2 緑色に点灯 ワイヤレス信号は中程度です |
| 1 緑色に点灯 ワイヤレス信号が弱い |
| すべての LED がオフになる ワイヤレス信号がない |

5. DC/UART1
| 番号 | キャラクター | 説明 | 入力/出力 |
| 1,2 | V | +Vcc 電源入力(9~28V) | 私 |
| 3,4,7 | G | GND | I/O |
| 5 | T | TXD(航空ユニットから外部へ) | ○ |
| 6 | R | RXD(外部から航空ユニットへ) | 私 |
6. Ethernet
| 番号 | キャラクター | 説明 | 入力/出力 |
| 1 | T+ | TX+ | ○ |
| 2 | T- | テキサス州- | ○ |
| 3 | R+ | RX+ | 私 |
| 4 | R- | RX- | 私 |
7. UART2
| 番号 | キャラクター | 説明 | 入力/出力 |
| 1 | G | GND | I/O |
| 2 | R | RXD(外部から航空ユニットへ) | 私 |
| 3 | T | TXD(航空ユニットから外部へ) | ○ |
8. CVBSビデオ入力インターフェース
| 番号 | キャラクター | 説明 | 入力/出力 |
| 1 | G | GND | I/O |
| 2 | S | CVBSビデオ入力 | 私 |
9. SBUS出力インターフェース
| 番号 | キャラクター | 説明 | 入力/出力 |
| 1 | G | GND | ○ |
| 2 | V | +5V出力(Imax 1A) | ○ |
| 3 | S | SBUS_OUT | ○ |
10. タイプ A HDMI ビデオ入力インターフェイス
11. ボタン
プレス 10 秒, 航空ユニットはすべてのパラメータを工場出荷時の設定に戻します。
12. モードスイッチ
WBは広帯域です,広い無線周波数帯域を使用.
NBはナローバンドです,狭帯域を使用したマルチモジュール伝送.
ヒント: WBモード推奨,このモードはポイントツーポイント伝送のパフォーマンスが優れているため、.
地上ユニット

1. 電源インジケーター
地上ユニットの電源がオンの場合、このインジケータは緑色に点灯します.
2. リンクインジケーター
| LED パターンの説明 |
| 緑色に点灯 ワイヤレスリンクが確立されています |
| 消灯 無線リンクが失われました |
3. ステータスインジケーター
| LED パターンの説明 |
| まばたき 3 回 初期化OK, 周波数は 2.4GBlink 2 回 初期化OK, 周波数は 1.4GBlink 1 時間 初期化OK, 周波数は800Mです |
| 緑色に点灯 地上ユニット異常 |
4. RSSIインジケーター
| LED パターンの説明 |
| 3 緑色に点灯 無線信号が最も強い |
| 2 緑色に点灯 ワイヤレス信号は中程度です |
| 1 緑色に点灯 ワイヤレス信号が弱い |
| すべての LED がオフになる ワイヤレス信号がない |

5. イーサネットポート(RJ45)
ホストコンピュータに接続する. RTSP/TCP/UDPプロトコルをサポート.
6. USBポート(タイプA)
ビデオ録画用の USB ディスクに接続します
7. SBUS入力ポート
| 番号 | キャラクター | 説明 | 入力/出力 |
| 1 | G | GND | ○ |
| 2 | V | +5V出力 | ○ |
| 3 | S | SBUS_IN | 私 |
8. UART2
| 番号 | キャラクター | 説明 | 入力/出力 |
| 1 | G | GND | I/O |
| 2 | R | RXD(外部から地上ユニットへ) | 私 |
| 3 | T | TXD(地上ユニットから外部へ) | ○ |
9. DC/UART1
| 番号 | キャラクター | 説明 | 入力/出力 |
| 1,2 | V | +Vcc DC入力(9~28V) | 私 |
| 3,4,7 | G | GND | I/O |
| 5 | T | TXD(地上ユニットから外部へ) | ○ |
| 6 | R | RXD(外部から地上ユニットへ) | 私 |
10. HDMI(タイプA)
FHDビデオ出力ポート .
11. ボタン
しばらくお待ちください 3 ビデオ録画を開始して押し続けるまでの秒数 3 録音を停止するまでの秒数. 最初にUSBストレージデバイスを挿入する必要があります.
10秒間待ってください, 地上ユニットはすべてのパラメータを工場出荷時の設定に戻します。
12. モードスイッチ
WBは広帯域です,広い無線周波数帯域を使用.
NBはナローバンドです,狭帯域を使用したマルチモジュール伝送.
航空ユニットと地上ユニットは同じ方向である必要があります.
インストール
空気
1. ドローンに航空ユニットを取り付ける

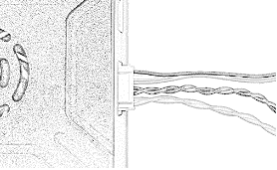
1.1 MMCX-to-SMA ケーブルを航空ユニットの側面にあるポートに挿入します。. カチッという音が聞こえたら, それは良好な接続を意味します.
1.2 ドローンのデバイスとRFケーブルを修正しました. アンテナを設置する. アンテナの接続に注意して締めてください. アンテナを下向きにする. アンテナから 20cm 以内に金属や遮蔽物がないこと.
2. カメラを接続する (ジンバル).

HDMI/SDI/イーサネットケーブルを使用してカメラ/ジンバルを航空ユニットに接続します. そしてUART1とSBUSをフライトコントローラーに接続します. アンテナをモーターやESCの近くに置かないでください。, そうしないとデバイスが干渉されます.

ドローン設置完成図
地面
1. アンテナを接続する
1.1 デバイスに付属のグラスファイバーアンテナを地上ユニットに接続します。. 共通のポート (SMA) があります。. ジョイント部分はしっかり締めてください. ザ・ 2 グラスファイバーアンテナは1.5m離す必要があります.

1.2 HDMIケーブルを接続する .
HDMIケーブルを使用してHDMIポートをモニターに接続します. FHDビデオ信号がモニターに直接表示されます。.
2. 地上局に接続する
地上局には M51 地上ユニットとの 2 つの接続方法があります, ビデオやデータを送信するため.
ビデオを入手
1. HDMI経由で直接
Ground Station に HDMI モニターがある場合, HDMIケーブルを介して地上ユニットをモニターに直接接続するだけです.
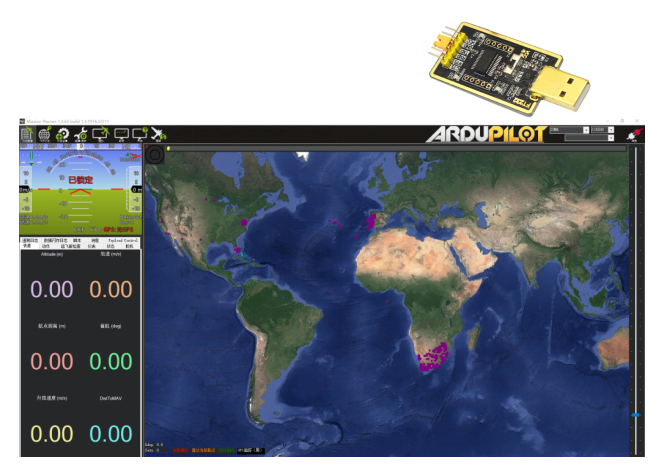
2. イーサネット経由
CAT ケーブルを使用してイーサネット ポートをコンピュータまたは地上局に接続します. ユーザーはサードパーティのソフトウェアを使用してデコードできます, VLCなど, ミッションプランナー.
M51の航空ユニットにIPカメラを接続する場合, 地上ユニットは、HDMI 経由で FHD ビデオを直接モニターに出力することもできます。. ビデオチュートリアルとこのドキュメントの他の部分をご覧ください。.
データの取得
1.UART1およびUART2を介して地上ユニットからデータを取得できます. UARTからUSBへのコンバータが必要かもしれません.
2. UDP/TCPプロトコルを使用してイーサネットポートからデータを取得できます.

地上接続図
M51 命令
クイックスタート
1. 準備中
すべての接続の準備ができていることを確認してください, アンテナも含めて, HDMIケーブルなど.
2. 電源を入れる
DC電圧は9〜28Vです. 電源投入後, POWER LED が緑色に点灯します。.
ご質問は何でも, FAQを参照してください. かかる 15 起動までの秒数. システム起動後, 無線伝送を確立できます. ビデオ送信には時間がかかります 15 さらに数秒.
M51 とミッション プランナー
Mission Planner で M51 を使用するには、次の手順に従います。:
1. M51航空ユニットのUART1をフライトコントローラーに接続します, ピクホークなど. ジンバルを M51 ETH または HDMI に接続します.
2. すべての空気および接地ケーブルの接続が完了していることを確認してください. システムの電源を入れます.
3. Mission Planner をコンピュータにインストールする.

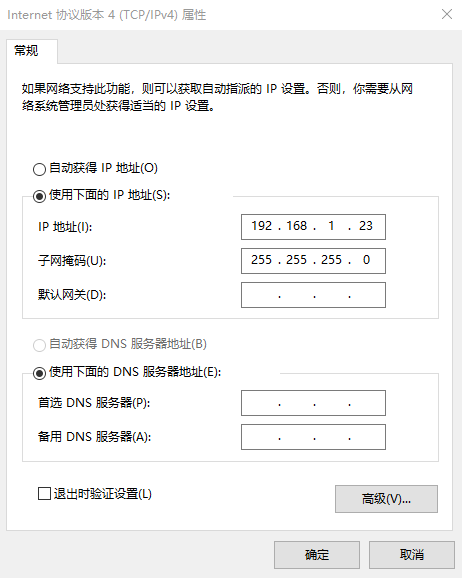
4. コンピューターのIPアドレスを設定する.
「ネットワークとインターネット」設定を開きます. 「インターネットプロトコルのバージョン」を選択します。 4 (TCP / IPv4) プロパティ」. IPアドレスを「192.168.1.xxx」に変更します(xxxは0~255の数字です),を除外する 192.168.1.36 および 192.168.1.100)。
5. データの取得
M51地上ユニットからデータを取得するには3つの方法があります, ミッションプランナーを使って:
- イーサネット経由の UDP ポート;
- イーサネット経由の TCP ポート;
- UART (COM)
5.1 UDPポートからデータを取得する.
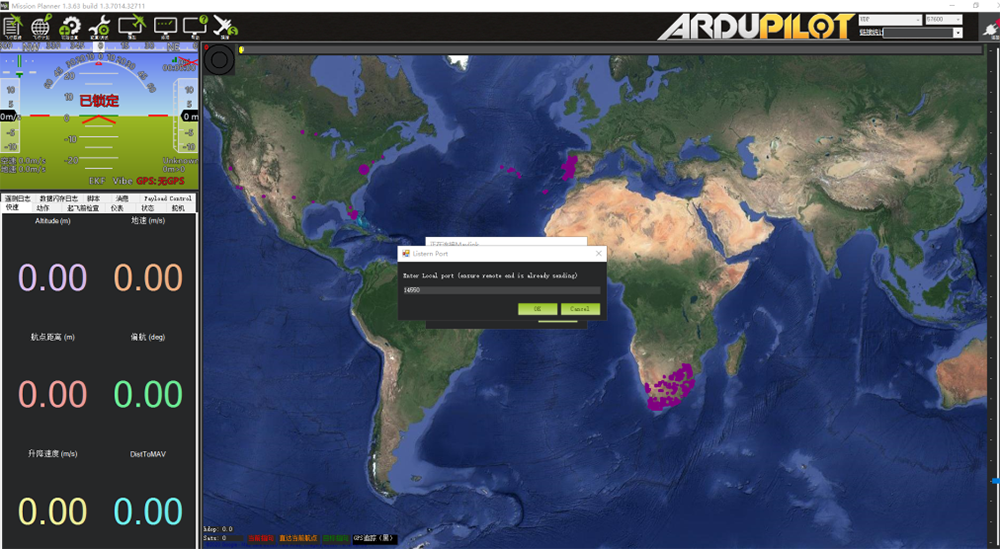
オープンミッションプランナー,UDPを選択します,「接続」ボタンをクリックします, 新しいウィンドウ「リッスンポート」が表示されます。,ポートを14550に変更します(WebページでUDPポート番号を変更している場合), 新しい番号を入力してください. 詳細については, Web ページの設定に移動してください)。「OK」をクリックします。, ミッションプランナーは飛行データを取得します。
5.2 TCPポートからデータを取得する.
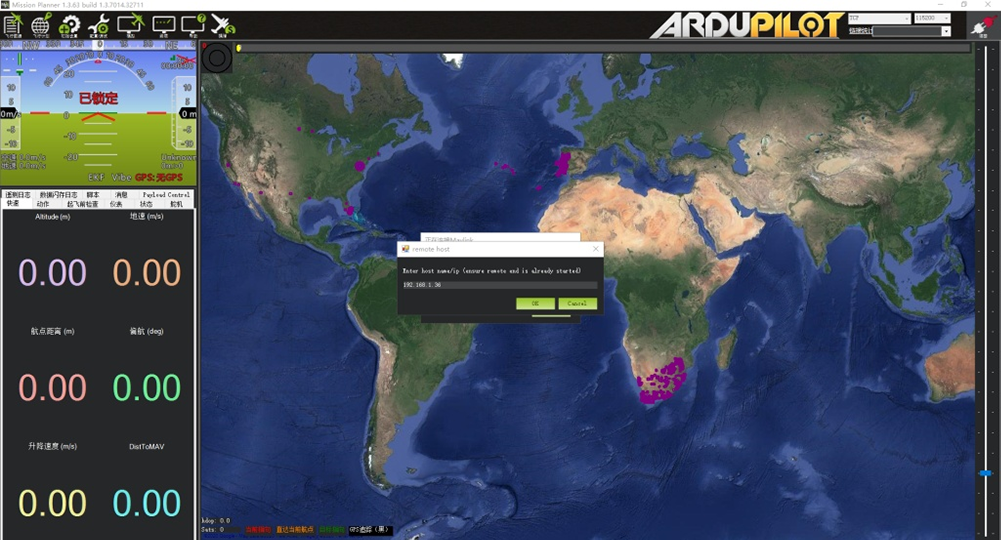
オープンミッションプランナー,TCPを選択します,「接続」ボタンをクリックします, 新しいウィンドウ「リッスンポート」が表示されます。,空白にIPを入力してください: 192.168.1.36, リモートポートは 5760
(Webページ上でIPアドレスとTCPポート番号を変更した場合), 新しいIPとポート番号を入力してください. 詳細については, Web ページの設定に移動してください)。「OK」をクリックします。, ミッションプランナーは飛行データを取得します.
5.3 UARTからデータを取得する(COM);
地上ユニットUART1をUART(TTL)で接続
USBコンバーターからコンピューターへ. この前に, お願いします
ドライバーをコンピューターにインストールする.
オープンミッションプランナー, COMを選択 (COM番号を確認してください) そして適切なボーレート,「接続」ボタンをクリックします, ミッションプランナーは飛行データを取得します.
6. ビデオを入手
ミッションプランナーを開いたとき, [ビデオ] をクリックし、[GStream ソースの設定] をクリックします。,以下に示すように:


住所を入力してください: rtspsrcの場所=rtsp://192.168.1.36/ストリーム0のレイテンシー=0 ! デコードビン ! ビデオ変換 ! ビデオ/X-RAW,フォーマット=BGRA ! アプリシンク名=アウトシンク
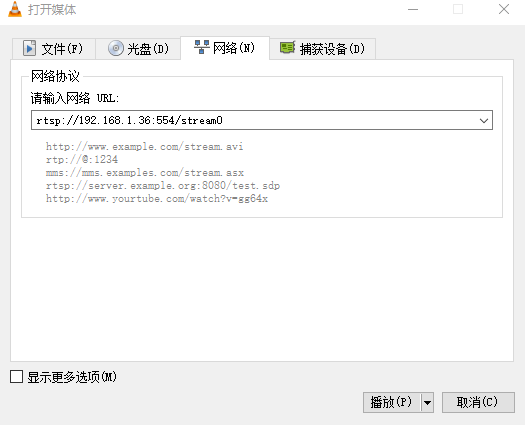
M51とVLC
- 上記のようにコンピュータのIPアドレスを設定します. M51が正しく動作していることを確認してください.
- 「オープンメディア」ページ内, 次のアドレスを入力してください:
rtsp://192.168.1.36:554/ストリーム0
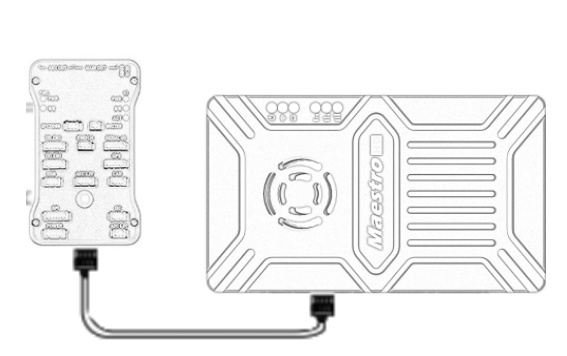
SBUS により RC コントローラーの距離を改善
- 航空ユニット SBUS をフライト コントローラー RC IN に接続します.
付属品ボックス内の SBUS ケーブルを使用して航空ユニットをフライト コントローラーに接続する. ケーブルは 3 ピン.
注意:航空ユニットのSBUSポートから出力されます. +5V 出力電流の最大値は 1A. +5Vが必要ない場合, 開けてみましょう. インプットとして受け取らないでください. さもないと, システムの安定性に影響します.
- RC受信機を地上ユニットに接続します
付属品ボックス内の SBUS ケーブルを使用して地上ユニットを RC 受信機に接続する.
注意:地上ユニットのSBUSポートが入力されます. +5V 出力電流の最大値は 1A. RC受信機に電力を供給するために使用できます. ケーブル回線の順序に注意してください.

地上ユニットでビデオを録画する
1. USB ストレージ デバイスを地上ユニットの USB ポートに挿入しました. HDMI出力画面に「USBデバイスが挿入されました」と表示される.
2. 地上ユニットのボタンを押すと、 3 録音開始までの秒数. HDMI出力に「Recording…」と表示され、タイミング録画を開始します。.
3. 録音を停止するには, ボタンを押し続ける 3 秒. ビデオはストレージデバイスに自動的に保存されます.
4. サードパーティのビデオプレーヤーでビデオを再生できます.
マエストロアシスタント
マエストロアシスタントのインターフェース

機能説明:
【1】情報表示:M51 のステータス情報を表示します。。
【2】UART(COM) 選択する:M51 に接続するコンピュータの正しい COM 番号を選択してください. 別のCOMに変更したい場合 , 「更新」ボタンをクリックしてください.
【3】ボーレート選択:COM に適切なボー レートを選択します. M51 UART1と同じにする.
【4】COMボタンを開く.
【5】COMボタンを閉じる.
【6】現在のパラメータ読み出しボタン:このボタンをクリックしてデバイスの現在のパラメータを取得します。
【7】ウィンドウクリアボタン: 情報表示を消去するには.
【8】周波数の選択:選択できる周波数帯域は 800MHz/1.4GHz/2.4GHz の 3 つです。. 必要なバンドを選択してください,そして「設定」ボタンをクリックしてセットアップを完了します. 「取得」ボタンをクリックして現在の周波数帯域を取得します.
【9】帯域幅の選択:選択できる帯域幅は 4 つあります — 3MHz/5MHz/10MHz/20MHz. 必要な帯域幅を選択してください,そして「設定」ボタンをクリックしてセットアップを完了します. 「取得」ボタンをクリックして現在の帯域幅を取得します.
【10】パワーレベルの選択:高/中/低の 3 つの出力レベルを選択できます。必要な出力レベルを選択してください。,そして「設定」ボタンをクリックしてセットアップを完了します. 「取得」ボタンをクリックして現在の電力レベルを取得します.
【11】ボーレートの選択:このボックスで M51 Uart1 に適切なボーレートを選択できます.
必要なボーレートを選択してください,そして「設定」ボタンをクリックしてセットアップを完了します. 「取得」ボタンをクリックして現在のボーレートを取得します.
【12】ホッピングモードの選択: ホッピング/固定の 2 つのモードを選択できます。. 必要なモードを選択してください,そして「設定」ボタンをクリックしてセットアップを完了します. 「取得」ボタンをクリックしてモードを取得します. 固定モードを選択した場合, 以下の固定周波数を選択する必要があります. 固定周波数は周波数帯域と帯域幅に関係します。.
【13】暗号化を選択: 暗号化を無効/有効にすることができます. この機能を有効にすると, プライベートパスワードを設定できます. パスワードは 100000 ~ 999999 の範囲にする必要があります。. パスワードが異なるデバイスはリンクしない.
【14】作業モードの選択: M51 には 2 つの動作モードがあります — ポイントツーポイントモードとリピーターモード. 必要な作業モードを選択してください,そして「設定」ボタンをクリックしてセットアップを完了します. 「取得」ボタンをクリックして現在の動作モードを取得します. この機能は M51 航空ユニットにのみ設定する必要があります。. 地上ユニットは自動的に同期可能. リピーターモードを選択した場合, 航空ユニットがTXかリピーターかを選択する必要があります.
マエストロアシスタントの使い方
1. M51 を Maestro Assistant に接続する。
Maestro Assistant は、M50/M51 を設定する Windows ソフトウェアです。. 設定前, UART1をUART経由でコンピュータに接続してください(TTL) USBコンバータへの変換.
適切な COM とボーレートを選択します. 「開く」ボタンをクリックします.
2. 現在のパラメータを読み取る。

ステップ1の後, 「読む」ボタンをクリックします. 現在のすべてのパラメータが情報ディスプレイに表示されます。. ワーキングモードは航空ユニットのみのため. 地上ユニットの設定では、「作業モード」ボックスが灰色になります。.
3. 構成.
3.1 周波数帯域
選択できる周波数帯域は 3 つあります
——800MHz/1.4GHz/2.4GHz. 選択できるのは、
地域の規制に従って適切な周波数帯域.
各バンドの具体的な周波数は次のとおりです。:
800メガヘルツ:806~825MHz;
1.4GHz:1427~1447MHz;
2.4GHz:2408~2480MHz;

3.2 帯域幅
選択できる BW は 4 つあります — 3MHz/
5MHz/10MHz/20MHz. 帯域幅が大きいほど, 多ければ多いほど
データを送信できる, しかし弱ければ弱いほど、

干渉防止. 固定周波数モードの場合, M50/M51には
小さな帯域幅でより多くの頻度で修正が可能.

追加, M50/M51にはショートカットキーがあります.
BWを簡単に変更できます. NBはナローバンドですが、,
WBは広帯域です. 空軍・地上部隊共通,
ショートカットキーは同じ場所にあるはずです. さもないと, 彼らはリンクできません.
3.3 RF電力

M50/M51 は 3 つのパワーレベルを選択できます.
機器間で干渉を起こすため, お願いします
適切な送信電力を選択する. 具体的な
RF電力値は次のとおりです。:
1-低い:15dBmの;
2-ミッド:20dBmの;
3-高い:25dBmの。


3.4 ホッピング/固定モード
選択できるモードは 2 つあります — ホッピング
/修理済み. ホッピングモード時, M51は自動調整可能
干渉があるときの周波数. 固定モードの場合,
デバイスは特別な周波数に固定されています . それで、1つで
周波数帯域, 最大 4 セットのデバイスを使用できます.

3.5 暗号化
無線信号は送信中に暗号化できます.
この機能を有効にすると, プライベートパスワードを設定できます.
パスワードは 100000 ~ 999999 の範囲にする必要があります。. パスワードが異なるデバイスはリンクしない. この機能を無効にする場合, 異なる M51 空と地上を相互にリンクできます.

3.6 作業モード
M51 はポイントツーポイントモードとリピーターで動作可能
モード. M51の航空ユニットのみ設定が必要です. 地面
ユニットは自動的に同期できます. リピーターモード時, の
航空ユニットをTXに設定可能 (送信機) またはリピーター.

リピーターモードあり, M51 は NLOS 状況でも簡単に使用できます. 航空ユニットをもう1台購入するだけで、簡単に中継システムを構築できます。.
M51 Web UI 構成の説明
M51のパラメータはWeb UIからも設定可能. ユーザーはブラウザを通じて IP アドレスを入力して Web UI にアクセスできます. 航空ユニットのデフォルト IP は次のとおりです。 192.168.1.100. 地面は 192.168.1.36. リピーターモード時. TXは 192.168.1.100. リピーターは 192.168.1.101.
デバイスを別のIPアドレスに変更した場合, 新しい IP を介して Web UI にアクセスしてください. 変更したIPを忘れた場合, デバイスのボタンを押してください 10 デバイスの電源がオンになって工場出荷時の設定に復元されるまでの秒数.
デバイスの Web UI にアクセスするには、コンピューターの IP を 192.168.1.X に変更する必要があります。. 次の図に示すように:

M51 Air Web UI
1. ログイン

IPアドレスを入力したら 192.168.1.100 ブラウザで, 「ようこそ」ページが表示されます. デフォルトのユーザー名は次のとおりです: 管理者, パスワードは: 123456. その後、ログインできます.
2.エアー設定

In Air設定ページ, ユーザーはエア IP を変更できます 、 ゲートウェイとその他のパラメータ. 以下の表を参照してください.
| パラメータ | 価値 | 説明 |
| エアIP | デフォルト 192.168.1.100 | ユーザーが変更できる |
| ゲートウェイ | デフォルト 192.168.1.1 | ユーザーが変更できる |
| エンコードタイプ | H265/H264 | デフォルトの H265 |
| ビットレートモード | CBR/VBR | デフォルトのCBR |
| エンコードビットレート | 500kbps~5Mbps | ユーザーが変更できる, デフォルト 1M |
| 入力解像度 | 入力自動検出 | 現在のHDMI入力解像度を表示します |
デバイスパラメータを変更した場合, 再起動後に有効になります. IPアドレスを変更した場合, 再起動後、ブラウザに新しいアドレスを入力してください.
3.Data setting

User can change Baud rate of UART1 and UART2 in Data setting page. It will be in effect after rebooting.
4. Wireless Parameter setting

User can change wireless parameter on Wireless Parameter setting page . 以下の表を参照してください.
| パラメータ | 価値 | 説明 |
| 周波数 | 800M/1.4G/2.4G | オプション |
| 帯域幅 | 3/5/10/20M | オプション |
| 力 | High/Middle/low | オプション |
| Hopping Mode | Hopping/ Fixed | オプション |
| 暗号化 | Disable/ Enable | オプション |
| 作業モード | Point to Point Repeater Mode | M51の航空ユニットのみ設定が必要です. The ground unit can synchronize automatically |
Web UI configuration is the same as Maestro Assistant. User can check it in ‘How to use Maestro Assistant’ part 3 for more details.
When you configure parameter through Web UI, It will be in effect after rebooting
5.System Update

User can update CODEC version and FW version in System Update page. Before update, please download the latest software version from our website.
Click ’browse…’. アップグレードファイルを選択します. Click ‘Send’. アップグレードの進行状況バーが表示されます. アップグレードが完了するとシステムが再起動します. CODECとFWのバージョンはこのWebページで確認できます。
さらに, CODEC バージョンはビデオエンコード用です. アップグレード ファイルは大きいため、頻繁にアップグレードする必要はありません. したがって、CODEC ファイルと FW ファイルを別々に更新します。. 別途バージョンにご注意ください。.
6.システム運用

ユーザーは「システム操作」ページで復元および再起動できます。. 「復元」はすべてのパラメータを工場出荷時の設定に戻すことです。

「Reboot」はシステムの再起動に使用されます。

ユーザーがデバイスのIPアドレスを変更しない場合, 再起動後にログインページに移動します. IPアドレスを変更した場合, 再起動後、ブラウザに新しい IP アドレスを入力する必要があります.
M51 地上 Web UI
1.ログイン
IPアドレスを入力したら 192.168.1.36 ブラウザで, 「ようこそ」ページが表示されます. デフォルトのユーザー名は次のとおりです: 管理者, パスワードは: 123456. その後、ログインできます.

2.グラウンドセッティング

グラウンド設定ページ内, ユーザーはエア IP を変更できます 、 ゲートウェイとその他のパラメータ. 以下の表を参照してください.
| パラメータ | 価値 | 説明 |
| 地上IP | デフォルト 192.168.1.36 | ユーザーが変更できる |
| ゲートウェイ | デフォルト 192.168.1.1 | ユーザーが変更できる |
| 地上RTSPサーバー | ユーザーは編集できません. | ユーザーにRTSPサーバーのアドレスを伝えるために使用されます |
| IPカメラアドレス | デフォルトは 192.168.1.100、航空ユニットのエンコーダ IP です。 | ユーザーは自分の IP カメラアドレスに変更できます |
| IPカメラのユーザー名/パスワード | IPカメラによると | カメラに認証が必要な場合, 正しい名前とパスワードを入力してください |
| HDMI出力解像度 | 1080P60/1080P50/1080P30/1080P25/1080P24/1080I60/1080I50/720P60/720P50 | ユーザーはHDMI解像度を設定できます |
デバイスパラメータを変更した場合, 再起動後に有効になります. IPアドレスを変更した場合, 再起動後、ブラウザに新しいアドレスを入力してください.
3.Data setting

ユーザーはデータ設定ページで UART1 と UART2 のパラメータを変更できます. UART1 は 2 つのプロトコル、Mavlink をサポートします。 (デフォルト) そして透明. ユーザーはプロトコルを変更できます、ボーレート、UDP/TCPポートを簡単に. UART データは地上ユニットのイーサネット経由でコンピュータに送信できます。.
注意,UART1 と UART2 の UDP ポートと TCP ポートは同じであってはなりません.

4. Wireless Parameter setting

User can change wireless parameter on Wireless Parameter setting page . 以下の表を参照してください.
| パラメータ | 価値 | 説明 |
| 周波数 | 800M/1.4G/2.4G | オプション |
| 帯域幅 | 3/5/10/20M | オプション |
| 力 | High/Middle/low | オプション |
| 暗号化 | 無効化/有効化 | オプション |
| 作業モード | 自動的に同期する | 灰色に変わる |
When you configure parameter through Web UI, It will be in effect after rebooting
5. System Update

地上ユニットと航空ユニットの両方が同じ方法でアップグレードされます. このドキュメントの他の部分を参照してください.
6. システム運用

地上ユニットシステムと航空ユニットシステムの操作は同じです. このドキュメントの他の部分を参照してください.
仕様
| 周波数帯域 | 800MHz/1.4GHz/2.4GHz |
| 周波数範囲 | 800メガヘルツ:806MHz~825MHz1.4GHz:1427MHz~1447MHz2.4GHz:2408MHz~2480MHz |
| バンド幅 | 3MHz/5MHz/10MHz/20MHz |
| 変調モード | OFDM |
| EIRP | 25dBm±1dB |
| 感度 | ≤-92dBm |
| 範囲 | 17キロ*1 |
| ビデオビットレート | 500k~5Mbps |
| DC9~28V (バッテリー3S~6S) | |
| 空気 | 6.5W |
| 地面 | 5W |
| アンテナ | 2*MMCX で ,地上 2*SMA |
| UART | TTL3.3V,1 スタートビット, 8 データビット, 1 ストップビット, パリティなし. |
| UART1とUART2 | |
| ボーレート 115200(デフォルト),57600, 38400, 19200, 9600 | |
| HDMI (タイプA) | 1 |
| SBUS | 1 |
| ネットワークポート | 1 (水 GH1.25 4ピン) |
| 1(アースRJ45) | |
| USB (タイプA) | 1 (地面) |
| CVBS | 1(水GH1.25 2Pin) |
| 解決 | 1080P60の下位互換性 |
| コーデック | H.265/H.264 |
| ビデオビットレート | 500kbps~5Mbps |
| ビデオ遅延 | 250ミリ秒未満 |
| インタフェース | MMCX |
| タイプ | スティック状アンテナ |
| 偏光タイプ | 垂直 |
| 得 | 2.5dBi |
| SWR | ≤2.0 |
| インタフェース | SMA |
| タイプ | グラスファイバーアンテナ |
| 偏光タイプ | 垂直 |
| 得 | 7dBi |
| SWR | ≤2.0 |
| 作業温度 | -40℃~+70℃ |
| 保管温度 | -40℃~+85℃ |
| Humidity | 5~95%,結露しないこと |
| サイズ | 空気 93.5 × 54.5 × 17 mmグラウンド 112 × 63.5 × 19 ミリ |
| 重さ | 空気 105g 地面 143g |
*1 距離は干渉なし、LOS の条件下でテストされます。.
注記:上記の製品仕様の説明権は、Shenzhen Mainlink Aero communication Technology Co.に属します。, 株式会社.
よくある質問
| 1 説明 | 電源を入れても電源インジケーターライトが点灯しない |
| ソリューション: 1. 電源ケーブルの配線順序を確認してください. 2. DC電源範囲を確認してください. | |
| 2 説明 | 電源を入れてもリンクインジケーターライトが点灯しない. |
| ソリューション: 1. RFケーブルが正しく接続されていることを確認してください. 2. 空と地上のBWショートカットキーが同じ位置にあることを確認. 3. アンテナが正常であることを確認してください. | |
| 3 説明 | 空と地上のリンクは正常です, ただしHDMI出力はありません. |
| ソリューション: 1. カメラが正常に動作し、ケーブルが正しく接続されていることを確認してください; 2. HDMIモニターを確認する; 3. 弊社アフターサービスまでご連絡ください. | |
| 4 説明 | 説明HDMI モニター出力 OSD「トランスミッターロス」. |
| ソリューション: 1. この OSD は、地上ユニットが航空ユニットとの接続を確立していないことを意味します. 2. アンテナとRFケーブルを確認してください. 3. 弊社アフターサービスまでご連絡ください. | |
| 5 説明 | HDMIモニター出力OSD「ビデオソース入力なし」。 |
| ソリューション: 1. この OSD は、地上ユニットが航空ユニットとの接続を確立したことを意味します. しかし、航空はカメラを追加しないか、カメラが航空ユニットによって認識されません. 2. カメラと航空ユニットを接続するHDMIケーブルまたはイーサネットケーブルを確認してください. 3. 弊社アフターサービスまでご連絡ください. | |
| 6 説明 | リンクインジケーターライトは正常です. しかし、データは出力されません. |
| ソリューション: 1. UARTケーブルの配線順序を確認してください. 2. UARTのボーレートを確認してください. 3. 弊社アフターサービスまでご連絡ください. | |
| 7 説明 | 地上ユニットはRTSPビデオストリーミングを出力できません. |
| ソリューション: 1. ケーブル接続とワイヤレスリンクが正常であることを確認してください. 2. コンピュータのIPアドレスが正しいことを確認してください. 3、RTSPサーバーアドレスが正しいことを確認してください. 4、弊社アフターサービスまでご連絡ください. | |
| 8 説明 | SBUS通信エラー. |
| ソリューション: 1.SBUS の配線順序と +5V が正しいことを確認してください。. 2. 弊社アフターサービスまでご連絡ください. |
注記:詳細については, 公式ビデオチュートリアルをご覧ください. 外国人の方はYou Tubeをご覧ください .
質問する
ご回答をありがとうございました。 ✨