



目次
バージョン履歴
| 日付 | バージョン | 変更の説明 |
| 20241020 | V1.0 | 初期バージョン |
注意事項
- 回路の損傷を避けるため、デバイスの電源を入れる前にアンテナを取り付けてください。. 上記の理由による通信障害を避けるため、デバイスの 2 つのアンテナを大きな金属構造物から 15cm 以上離して配置してください。.
- 他の電子機器がアンテナに近づきすぎないように注意してください。. 機器のグランドノイズへの影響を避けるため.
- 地上端のアンテナに障害物がないように、できるだけ長く引きます。. 地上アンテナの高さは 3 メートル.
- ご使用の前に, すべての接続がしっかりしていて信頼できることを確認してください, すべてのコンポーネントは正常に動作します.
- 分解・改造はしないでください, そうでなければ保証はありません. インストールまたはテスト中に障害が発生した場合. 問題を解決するには, 元のテクニカルサポートにお問い合わせください.
1 製品概要
Vcan2149 は、小型化された自社開発の TDD 双方向グラフ統合無線伝送デバイスです. この製品にはリアルタイム干渉検出機能があります。, 適応周波数選択, アダプティブストリーム, 自動再送信と自動電力制御, これにより、対マルチパスおよび対干渉の能力が大幅に向上します。, 信頼性が高いという特徴を持っています, 優れた安定性と低遅延.
この製品は消防用に適しています, 検査, 監視, およびその他のシナリオ. 空対地視界が良好な場合, 伝送距離は最大15KM+です.
2 製品付属品
| Vcan2149 製品一覧 (2) | |||
| いいえ | 製品 | 説明書 | 番号 |
| 1 | Vcan2149 | TDD無線伝送無線機 | 2 |
| 2 | J30J-15ピン | 30cmケーブル | 2 |
| 3 | 小さな接着剤スティックアンテナ | 得: 2.5dBi | 2 |
| 4 | 小型アンテナ延長ケーブル | 30cmケーブル | 2 |
| 5 | オールインワン接地端子アンテナキット (オプション) | 6dBi 全方向性アンテナ | 1 |
| 6 | 全方向性アンテナ 3m延長ケーブル | 1 | |
| 7 | 3dBi フラット指向性アンテナ | 1 | |
| 8 | 指向性アンテナ4m延長ケーブル | 1 | |
| 9 | 3メートルブラケット + ハンドクランク + U- 形をした部分 | 1 | |







3 製品接続
3.1 接続図(空気)

3.2 空気接続
ステップ1: アンテナを接続する
2 つのアンテナ間の距離は、
15cm.テールはJ30J-15PINに接続されています.
ステップ2: シリアルポートを接続する
飛行制御装置または他のシリアルに接続可能
デバイス. シリアルポートレベルに注意してください.
ステップ3: ネットワークポートを接続する
カメラの接続には 1 つまたは 2 つのネットワーク ポートが使用されます。.
ステップ4: 電源を接続する
機器の電源 DC9~26V, 代表値: +12V.
ステップ5: STSライト
セカンダリ端末の電源が入っているのに電源が入っていない場合
同期した, STS には青色の点滅インジケーターが表示されます. いつ
メイン端末への接続は正常です, STSライト
信号品質に基づいて常緑/黄/赤を表示します
強さ.
3.3 接続図(地面)
3.4 アース接続
ステップ1: アンテナを接続する
2 つのアンテナ間の距離は、
15cm.テールはJ30J-15PINに接続されています.
ステップ2: シリアルポートを接続する
コンピュータのシリアルポートツールまたは他のシリアルポートデバイスに接続できます。.
ステップ3: ネットワークポートを接続する
ネットワークをコンピュータに接続する, コンピュータのIPアドレスを設定する
デバイスの IP アドレスと同じネットワーク セグメントに存在すること. 次に、WEB またはホスト コンピュータを使用してパラメータ設定とステータス照会を行います。
ステップ4: 電源を接続する
機器の電源 DC9~26V, 代表値: +12V.
ステップ5: STSライト
プライマリデバイスの電源は入っているが同期されていない場合,
STS は青色のインジケーターを点灯します。. スレーブとの接続が正常な場合, STS ライトは、信号品質の強度に応じて常緑/黄/赤で表示されます。.
ステップ6: ビデオを再生する
ビデオプレーヤーソフトウェアを開きます. ライブ配信ビデオを見る.
4 製品の使用
4.1 電源
このデバイスはDC 9~26V電源を使用します。, 代表値は+12V@3Aです. 異なる電圧下で, 正常に動作するマスター端子とスレーブ端子の平均電流を次の表に示します。. スレーブの消費電力 ≤25W, マスター消費電力 ≤10W
| 電源電圧 | 空気(奴隷) 動作電流 (A) | 地面(マスター) 動作電流 (A) |
| 12V | 1.80A | 0.80A |
| 24V | 0.90A | 0.40A |
| 26V | 0.75A | 0.37A |
| 述べる:電源には12V@3A電源を使用することをお勧めします。. | ||
4.2 配線定義

Vcan2149デバイスのインターフェースはJ30J-15PINを採用しています。, デフォルトのインターフェースは以下で構成されます 1 電源, 1 ネットワークポート, 1 RS232, 1 TTL, または 2 SBUS.
| 線形秩序 | ピン名 | インターフェースの定義 | インターフェースの説明 | 信号の方向 |
| 1 | VCC | 電源 DC9~26V | パワーポジティブ | 私 |
| 2 | VCC | パワーポジティブ | 私 | |
| 3 | GND | パワーネガティブ | 私 | |
| 4 | GND | パワーネガティブ | 私 | |
| 5 | TX1P+ | イーサネットポート *1 | TX+ | ○ |
| 6 | TX1M- | テキサス州- | ○ | |
| 7 | RX1P+ | RX+ | 私 | |
| 8 | RX1M- | RX- | 私 | |
| 9 | 5V | 5V出力 | SBUS 5V出力 | ○ |
| 10 | TXD_A | シリアルポート 1 RS232/TTL | シリアルポート 1 テキサス州 | ○ |
| 11 | RXD_A | シリアルポート 1 RX | 私 | |
| 12 | SBUS/TXD_B | シリアルポート 2 SBUS/TTL/RS232 (注記 4,5) | SBUS出力 (空気) SBUS入力 (地面) | IO |
| 13 | SBUS/RXD-B | IO | ||
| 14 | GND | シリアルポート 2 地面 | ○ | |
| 15 | GND | 地面 | シリアルポート 1 地面 | ○ |
注記 1: 信号方向 I は無線信号入力を示し、方向 O は無線信号出力を示します.
注記 2: シリアルポート 1 RS232/TTLでのみ使用可能, PIN10、11、15. 工場はハードウェアによって決まります, デフォルトはRS232です.
注記 3: シリアルポート 2 RS232/TTL/SBUSとして使用可能. 工場はハードウェアによって決まります. TTLとSBUSはソフトウェアで切り替え可能.
注記 4: シリアルポートの場合 2 SBUSです, SBUS12とグランド端の13pinが入っています, そして空端のSBUS12と13ピンが抜けています.
注記 5: デュアル SBus が使用されている場合, 空のSBUSをLine12に設定します->12行目. 13行目->13行目.
4.3 製品インジケータの意味

電源ランプ PWR(緑)
PWRランプ点灯時, デバイスの電源が入っています. ネットワークポート LAN (緑)
データの送受信中はネットワークポートライトが点滅します。.
ステータスライト STS (4色の光)
異なる色のライトは現在の信号品質の強度を示します.
| STS ライトは受信信号の SNR サイズを表します | |
| STSカラー | SNR |
| 青 | 接続が確立されていません |
| 緑 | SNR>10dBmの |
| 黄色 | 6dBmの<SNR<10dBmの |
| 赤 | SNR<6dBmの |
| モジュール | モード | PWR主導 | LANが被害を受けた | STS主導 |
| マスター | 非同期 | 緑色のライトが点灯しています | データ送信中、点滅中 | 青いライトが点灯しています |
| マスター | 同期 | 緑色のライトが点灯しています | データ送信中、点滅中 | (緑/黄/赤) 受信信号の強度に比例 |
| スレーブ | 非同期 | 緑色のライトが点灯しています | データ送信中、点滅中 | 青いライトが点滅 |
| スレーブ | 同期 | 緑色のライトが点灯しています | データ送信中、点滅中 | (緑/黄/赤) 受信信号の強度に比例 |
プライマリ装置とセカンダリ装置が同期していない場合, プライマリおよびセカンダリ デバイスの電源 PWR インジケータが点灯している, プライマリ デバイスの STS 青色インジケータは常にオンです. デバイスの STS からの青いライトが点滅します. マスターとスレーブが同期している場合, マスターとスレーブのSTSライトが3色のライトになります, 信号品質が良好な場合は緑色のライトが表示されます。. 黄色のライトは通信品質が中程度であることを示します. 赤いライトは通信品質が低いことを示します. ネットワークポートがデータを送受信しているとき, プライマリ装置とセカンダリ装置の LAN インジケーターが点滅します.
5 WEBパラメータ設定
5.1 デバイスIP
マスターのデフォルトのIPアドレス (地面) デバイスは 192.168.10.250, トランクデバイスのデフォルトのIPアドレスは次のとおりです。 192.168.10.251, およびスレーブのデフォルトの IP アドレス (空中) デバイスは 192.168.10.252. 代替 IP アドレスは次のとおりです。 192.192.192.192. デフォルトの IP アドレスは、ユーザーが使用および変更できるアドレスです。. 代替IP, 192.192.192.192, 変更できません. IPアドレスを忘れた場合, スタンバイ IP アドレスを使用して WEB ページにログインし、パラメータのクエリと設定を行うことができます。.
⚫ PCのネットワークセグメントを設定する(192.168.10.xxx)
コンピューターのネットワーク接続を開き、プロパティを右クリックします. 次の図に示すように、TCP/IPv4 プロパティを開きます。. 「詳細設定」をクリックします, IPを追加, コンピュータの IP は複数の IP を同時に追加できます. 同じコンピュータが異なるネットワーク セグメントで動作可能. 例えば, IPアドレスを追加する 192.168.10.123 およびIPアドレス 192.168.1.123 同時に. PC IP 構成を完了し、「OK」をクリックして構成を保存します。.

5.2 WEBアカウント番号とパスワード
プライマリのデフォルトの WEB アドレス (地上ユニット) デバイスは 192.168.10.250. デフォルトの Web 入力は次のとおりです。 192.168.10.251 トランクの上に (中継ユニット)デバイスと 192.168.10.252 二次側で (航空ユニット) デバイス.
アカウント: 管理者; パスワード: 123456

5.3 システム設定
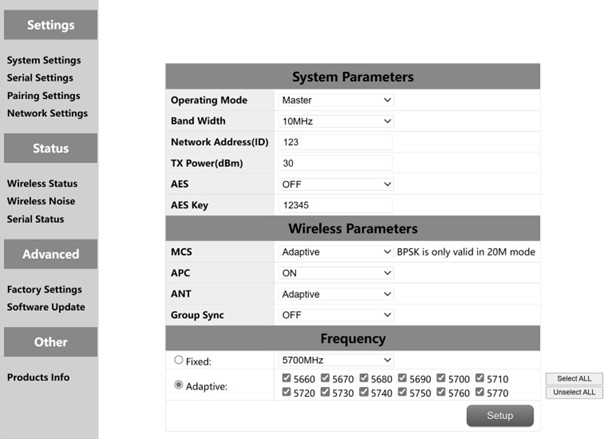
| いいえ. | 関数 | 説明書 |
| 1 | 動作モード | デバイスをマスターまたはスレーブエンドとして構成します |
| 2 | バンド幅 | チャネル帯域幅: 10/20メガヘルツ |
| 3 | ネットワークID | ネットワークID番号: 同じグループには同じID番号が使用されます. |
| 4 | 送信電力(dBmの) | 最大30dBm |
| 5 | AES | AES暗号化スイッチ |
| 6 | AESキー | AES秘密鍵 |
| 7 | MCS | 自動ストリーム制御 (オプションの適応モードまたは固定モード) |
| 8 | APC | 自動電力制御 (オプションのオンまたはオフ) |
| 9 | アリ | 2つのアンテナの自動選択 (固定アンテナ 1 またはアンテナ 2) |
| 10 | 複数のセットが共存する | 複数セットの共存スイッチにより、複数セットのデバイスを同時に使用できるようになります |
| 11 | 周波数 | 自動周波数選択 (オプションの適応型または固定型) |
複数セットの共存: スイッチを入れると, 最大 6 ペアのデバイスが同時に動作可能, ただし、一定の頻度で使用する必要があります. 周波数の選択: 固定周波数または適応周波数を選択可能. 適応周波数ポイントはすべて選択可能, または、使用する周波数ポイントのいずれかを選択することもできます.
5.4 シリアル設定
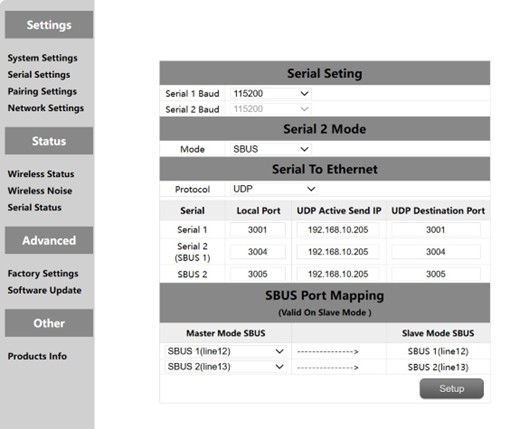
Vcan2149 デバイスには 2 つのシリアル ポートがあります, そのうちシリアルポートのレベル 1 そして 2 RS232またはTTLレベルです. シリアル ポートのレベルは工場出荷時のハードウェアによって決まります, お客様自身で変更することはできません. シリアルポートの場合 2 TTLです. シリアルポート 2 2つのSBUSとしても使用可能. グランド端の SBUS ピンは入力 IN です。, 空端の SBUS ピンは出力 OUT となります。. SBUSは5V出力もサポート.
Vcan2149 のシリアル ポートは、シリアルからネットワークへの機能をサポートします。. TCPとUDPによるシリアル伝送が可能. シリアルポートのデフォルトのポート番号 1 は 3001, そしてシリアルポートのそれ 2 は 3004.
5.4.1 シリアルツーシリアル
リモート シリアル ポートとローカル シリアル ポート間のマッピングは 1 対 1 です。. デフォルトでは, リモートシリアルポート 1 ローカルシリアルポートに対応 1, およびリモートシリアルポート 2 ローカルシリアルポート2に対応します。
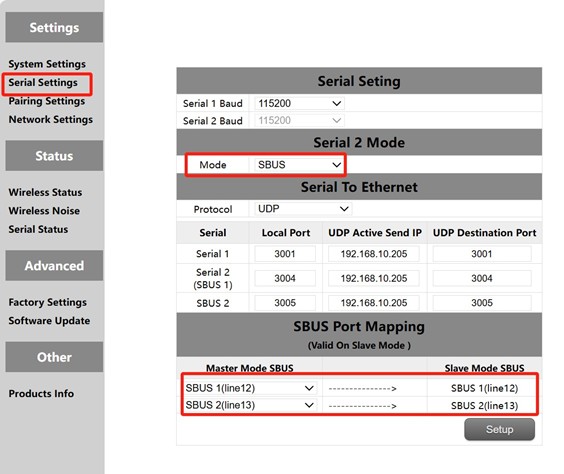
5.4.2. SBUS 構成
- 空側と地上側のWEBをオープン, 左側のシリアルポート設定をクリックします.
- シリアルポートを変更する 2 プライマリとセカンダリの両方のエンドで SBUS モードに移行.
- PIN12出力に対応して空側のSBUSマッピングをPIN12入力に変更, PIN13出力に対応するPIN13入力. グランドエンドの SBUS マッピング構成が無効です.
初め, シリアルポートを設定する必要があります 2 一次局と二次局をSBUSとして. モジュールは 2 つの SBUS をサポートします. 加えて, ピン 12 そして 13 グランド端にはSBUS入力があります. ピン 12 とピン 13 空の端にはSBUS出力があります. ザ・ 12 空端のピンは、 12 接地端のピン. ザ・ 13 空端のピンは、 13 接地端のピン
5.4.3. シリアルポートからネットワークポートへ/ネットワークポートからシリアルポートへ
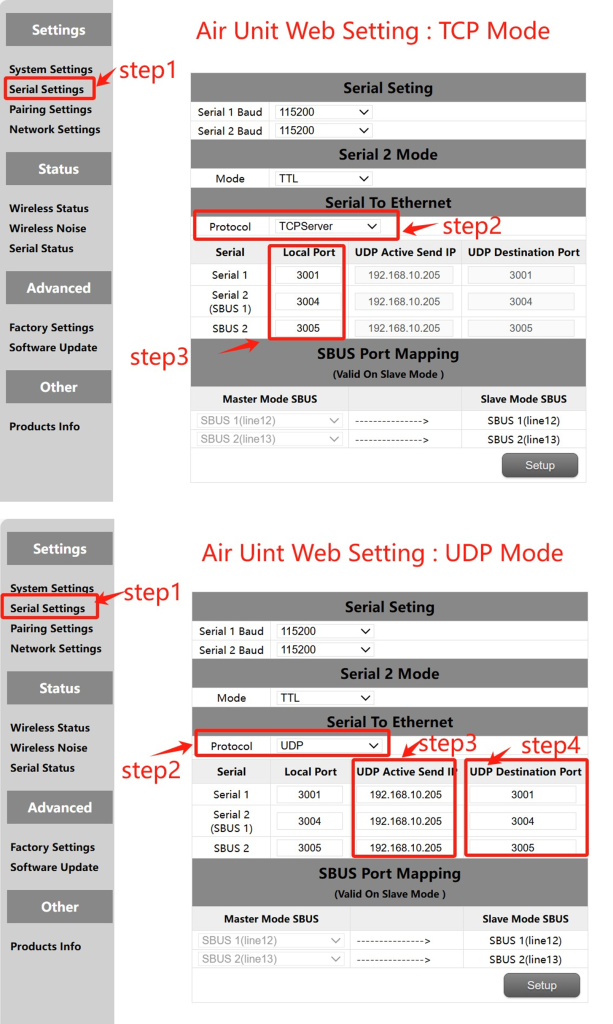
シリアルスイッチング機能, またはネットワークスイッチングは主にシリアルポート入力です, ネットワークポート出力またはネットワークポート入力, シリアルポート出力, 等. スカイ エンドのシリアル ポートは、送信用に TCP または UDP として設定されます。. 以下は、TCP/UDP プロトコル送信を実行する Mission Planner 地上局の例です。.
ミッションプランナー (TCPモード)
TCP設定 (エアシリアルポート)
ステップ 1: を開きます – Sky Side Webページのシリアル設定バー
ステップ 2: シリアルからネットワークへのプロトコルを TCP サーバーに変更します
ステップ 3: ポート番号を決定する. シリアルポートのデフォルトのポート番号 1 は 3001, シリアルポート 2 は 3004. 最後に「設定」ボタンをクリックします.
MissionPlaner の TCP 構成
ステップ 1: ミッションプランナーを開く
ステップ 2: MP 選択 TCP モード, シリアルポートのボーレートを使用しないでください, 「接続」ボタンをクリックします. ホスト名/IPを入力してください: 192.168.10.252(スカイエンドのデフォルトIPアドレス). リモートポートを入力してください: 3001 (シリアルポート 1). 3004 (シリアルポート 2).
⚫ ミッションプランナー (UDPモード)
UDP設定 (エアシリアルポート)
ステップ 1: を開きます – Sky Side Webページのシリアル設定バー.
ステップ 2: シリアルからネットワークへのプロトコルを UDP サーバーに変更します.
ステップ 3: シリアルポートのアクティブなUDP IPアドレスを入力します。. MPがインストールされているコンピュータのIPアドレスです.
ステップ 4: UDPターゲットポート番号を決定する. シリアルポートのデフォルトのターゲットポート番号 1 に 2 は 3001-3004. 顧客の要件に基づいて、ターゲット ポート番号を別のポート番号に設定することもできます。. 最後に「設定」ボタンをクリックします.
Mission Planer の UDP 構成
ステップ 1: ミッションプランナー地上局を開く
ステップ 2: MP 選択 UDP モード, シリアルポートのボーレートは必要ありません, 「接続」ボタンをクリックします。 ローカルポートを入力してください: 3001 (シリアルポート 1). 3004 (シリアルポート 2).
5.5. ペアリング設定
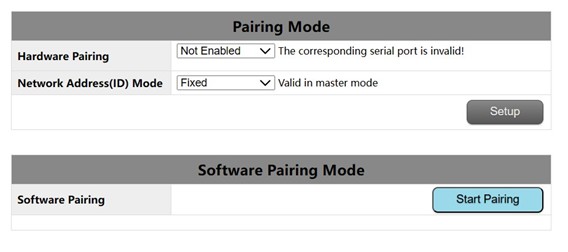
ペアリング機能はハードウェア構成とソフトウェア構成により実現可能. ID 番号をプライマリ エンドで設定して、自動ペアリングにランダム ID 番号を使用するか、元のプライマリ エンドの固定 ID 番号を使用するかを決定できます。. このパラメータは、セカンダリ エンドでの ID モードの設定には無効です.
ペアリング前提:
ペア機器はプライマリ機器とセカンダリ機器の場合のみペアリング可能です. 両方のデバイスがプライマリ デバイスまたはセカンダリ デバイスの場合, ペアリングできない.
ハードウェアのペアリング条件:
- 以内に有効 60 開始から数秒後, 以降は無効です 60 秒.
- 接続中は無効です (同期した) 州.
- 起動後に一度ペアリングモードに入っている, たとえ
時間はまだ60秒以内です.
ハードウェアペアリング設定:(航空ユニットと地上ユニットは独立して構成されています)
- Web設定: シリアルポートの選択 1 またはシリアルポート 2 またはシリアルポート 4 として
ペアリングされたシリアルポート.
- 設定後, 対応するシリアル ポートの TX と RX を少なくとも 1 分間ショート接続します。 2 秒. スイッチボタンを長押しすることで、お客様自身でスイッチボタンをはんだ付けすることができます。 2 秒. TX と RX も可能です
一緒にループした.
- RSSIインジケーターが点滅して消灯した場合, デバイスがペアリングモードに入ります.
ピアデバイスもペアリングモードに入るまで待ちます.
ソフトウェアペアリング設定:
をクリックします。 “ペアリングを開始する” ページ内のボタンをクリックしてペアリングを開始します. 後 2 分, もし
ペアリングが失敗する, デバイスは再度ペアリングする前のステータスを表示します.
5.6 IP設定(ネットワーク設定)

1.プライマリ ノードのデフォルトのローカル IP アドレスは次のとおりです。 192.168.10.250.
2.リピータノードのデフォルトのローカルIPアドレスは次のとおりです。 192.168.10.251.
3.スレーブノードのデフォルトのローカルIPアドレスは次のとおりです。 192.168.10.252.
4.代替IPアドレスは、 192.192.192.192.(変更できません)
5.7 無線ステータス
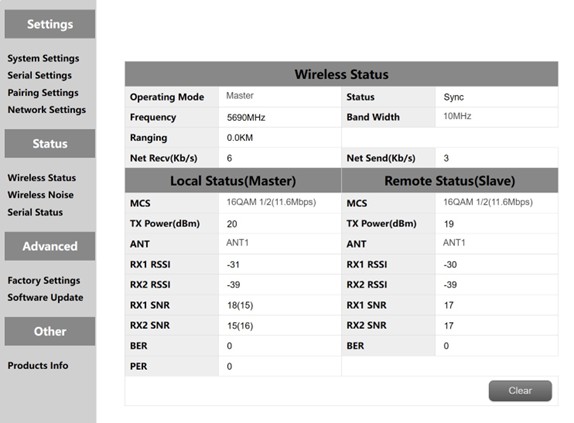
無線ステータスは主にチャンネル情報を表示します。, マスターノードとスレーブノードなど, 同期するかどうか, 動作周波数ポイント, 距離表示とネットワークデータ量統計. また、ローカル デバイスのステータスとリモート デバイスに関するいくつかの情報も表示されます。. 例えば, MCS (ストリームモード), 電力を送信する, 2チャンネル受信エネルギー, 2チャンネルの受信信号対雑音比とエラーパケットPERの表示.
距離表示はマスターのみ表示可能. バックグラウンドノイズの検出はマスターの電源がオンのときに実行されます。. スレーブは同期前にバックグラウンドノイズを検出しません. スレーブは同期後にのみバックグラウンド ノイズを検出します。
マスターのネットワーク送信は、マスターから PC に送信されるデータの量を示します。. スレーブのネットワーク受信は、スレーブがカメラから受信したデータ量を示します。.
5.8 無線ノイズ
背景ノイズ検出は主にマスターおよびスレーブ機器の周囲干渉を検出するために使用されます。. 赤い線は一次側のボトム ノイズを表し、青い線は二次側のボトム ノイズを表します。. そして絶対値が低いほど, 掃除すればするほど床の騒音はなくなる, つまり, 干渉源が小さいほど. 例えば, -100dBm は -90dBm よりも優れています. フロアノイズ検出は、テスト環境に干渉があるかどうかを顧客が迅速に判断するのに役立ちます.
- クリーン環境での床騒音検知
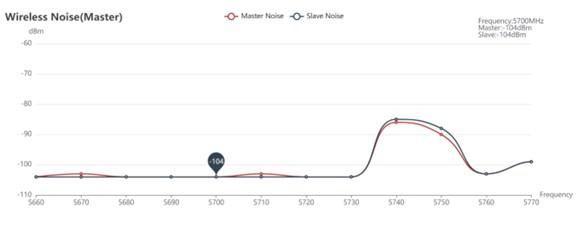
- 干渉がある場合のフロアノイズ検出

5.9 工場出荷時設定にリセット
デバイスのデフォルトの工場設定はセカンダリです (空中) パラメータ, 工場出荷時の復元後のデフォルトのネットワーク IP アドレスは次のとおりです。 192.168.10.250.
5.10 ソフトウェアのアップグレード
システムアップデート, お客様がファームウェアをアップデートするための, ファイルを選択をクリックします, 対応する書き込みファイルを選択します, アップグレードが成功した後, もう一度電源を入れてください. ファームウェアの損失を避けるため、アップグレード中に電源を切らないでください。.
5.11 製品情報

このセクションではシリアル番号について説明します, ソフトウェア, およびデバイスのハードウェア バージョン番号.
質問する
ご回答をありがとうございました。 ✨