


注意: 先连接天线后, 接通电源,开始软件配置和调试. 连接天线后, 参数可实时监控.
地面站 (DC10~30V供电)

机载接口说明

目录
1. 电脑设置
将设备连接至计算机, 检查电脑网络连接中的设备IP地址以及与设备地址同一网段 (下面的图片). 如果您不知道设备计算机, 可以设置电脑自动获取IP, 然后检查计算机网络连接状态以获取设备IP地址, 然后设置在同一网段, 最好关闭电脑上的Windows防火墙.



2. 运行参数配置软件
打开后 1400_TDD_COFDM_ConfigV3.3 软件, 出现主界面:
2.1 打开设备电源并将其连接到计算机
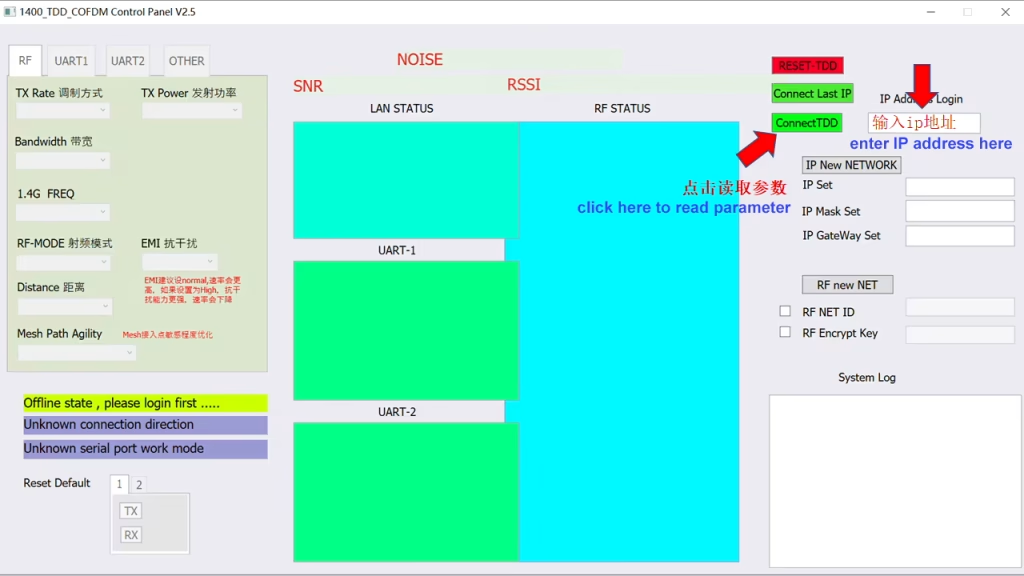
在右侧的IP地址登录窗口中输入设备的IP地址。
此处可以输入本地设备的IP地址或远程设备的IP. 多台设备连接成功后, 任意终端的IP都可以使用.
点击ConnectTDD进行连接. 或者直接点击连接最后一个IP即可快速登录.
登录后读取通道参数

2.2 登录和网络设置
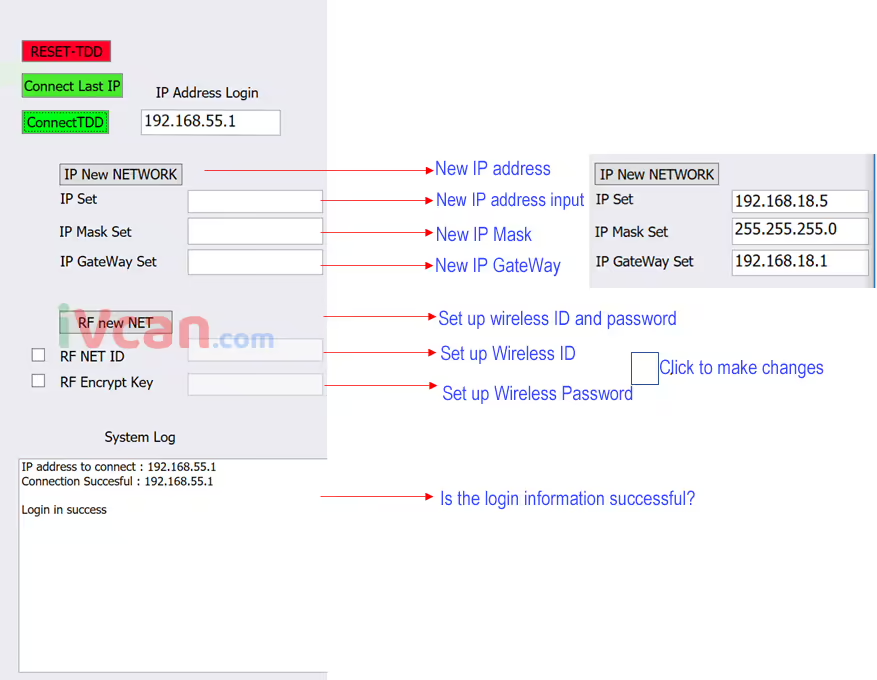
注意: 通电后设备启动大约需要3~5秒. 点击后 连接TDD,
| 登录成功信息 | 登录失败信息 |
| 要连接的 IP 地址 : 192.168.55.1 | 警告 , 现在不需要再次连接 , 系统正在工作 …. |
| 连接成功: 192.168.55.1 | 要连接的 IP 地址 : 192.168.55.1,设备未连接 |
| 登录成功 |
红色字体 休息-TDD, 重新启动程序
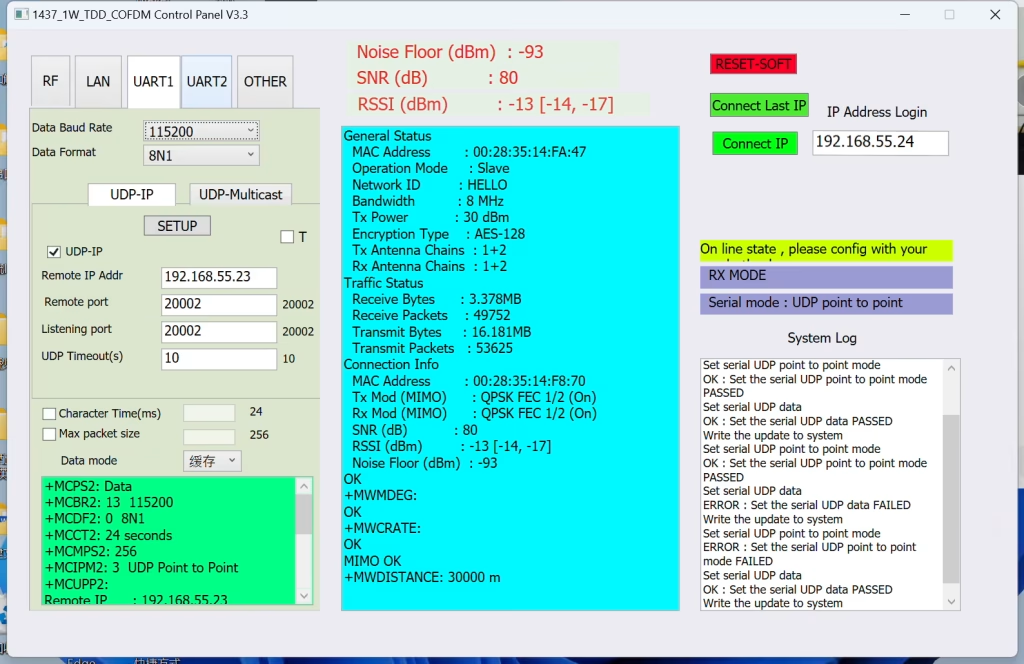
2.3 监控信息
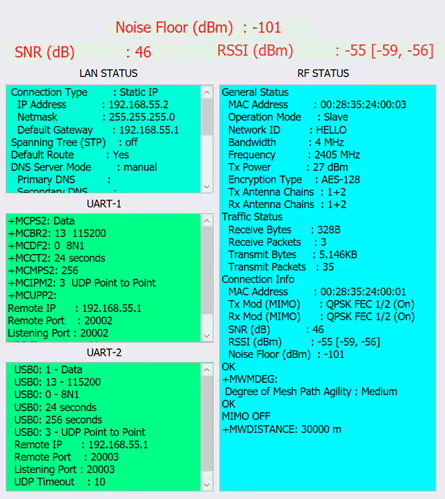
- 设置参数前, 你需要看看电磁环境的频率. 本底噪声越低, 越好. 终端接入场强和信噪比.
- 参数设置成功后, 它们将显示在相应的列中. 可以检查设置模式是否正确.
- 显示连接的信噪比, 信号强度 (天线 1, 天线 2) 和背景噪音。
- 如果背景噪音太大, 说明干扰严重,需要更换频段。
- 您可以随身携带频谱分析仪,现场测试干扰。
- 注意这里的数据是一对一的, 主从模式数据. 一对多或MESH模式下每个终端的详细数据, 请参考RF STATUS相关数据.


显示无线相关数据:

模式, 身份证号码, 带宽, 频率, 电量及其他数据. 与连接设备相关的数据, 设备编号, 信噪比, 接收信号强度指数, 本底噪声和其他数据.

- 显示连接的信噪比, 信号强度 (天线 1, 天线 2) 和背景噪音。
- 如果背景噪音太大, 说明干扰严重,需要更换频段。
- 您可以随身携带频谱分析仪,现场测试干扰。
- 注意这里的数据是一对一的, 主从模式数据. 一对多或MESH模式下每个终端的详细数据, 请参考RF STATUS相关数据.
3. 参数设置

登录后, 您可以显示和设置设备相关数据。
- 设置调制方式, 力量, 带宽, 频率, 距离, 和模式.
- 调制带宽: 2, 4, 8兆赫
- 频率设定: 1430-1444
- 调制方式: BPSK前向纠错 1/2, 四相移键控前向纠错 1/2, 四相移键控前向纠错 3/4, 16-QAM 1/2, 16QAM 3/4, 64QAM 2/3, 64QAM 3/4, 64QAM 5/6, 汽车 (通常设置为 BPSK FEC 1/2, 移动期间的 QPSK FEC 1/2)
- 设置更高的调制方式将传输更大的数据量, 但灵敏度会降低. 如果主机发送数据量较大,从机数据量较小, 主机可设置16-QAM, 从机 BPSK, 和不对称设置. 如果数据量未知, AUTO可以设置多大. 如果指定调制方式可能会更稳定.
- 无线距离: 航站楼之间的距离. 这个值非常重要, 特别适用于长距离传输. 需要填写对应的值. 如果信噪比等数据正常但速率较低, 你可以增加这个值.
- 射频模式: 掌握 (主持人) 奴隶 (奴隶) 特别指定 (中继) 网 (无中心网络)
- 主从模式: 一位Master对应一位Slave (一对一模式) 或者一个master可以对应多个slave (一对多模式).
- 自组织模式: 一台主机对应多个AD-HOC从机. AD-HOC从站也可以相互通信. 备用数量比MESH模式多, 并且延迟和传输数据量均小于MESH模式.
- 一台主机对应多个AD-HOC从机, 然后对应多个slave, 形成混合网络.
- 网格模式: 无中心网络, 多MESH终端组网 (多对多模式)
- 网格路径敏捷性: 网络路径稳定性优化, 可以设置为高; 中等的; 低的,
- 当网络节点发现新的网络路径时, 每个节点都会创建一个路径表并自动优化.
- However, 增加或者减少节点都会带来一些问题, 例如: 需要重新建立连接并更新路径表, 并且链接可能会暂时中断.
- 一方面, 整个链接需要保留原有链接的稳定性, 另一方面, 路径表需要刷新以适应不断变化的网络. Therefore, 当新增网络或单个网络信号较差时使用该参数. 路径更新路径表的敏感性. 一般设置为Medium, 实际上是根据工程经验设定的. 内部参数可以在右侧RF STATUS中看到.
- 窄带数据 (串口数据) 设置
串口设置页面, 此处设置UART串口相关数据:

数据波特率: 设置串口波特率, 从 300 至 921600
这是设置COM1的数据
数据格式: 8N1 8E1 8O1, 验证参数
串口UDP-IP传输模式: (此模式是一对一的, 单播模式, 适合点对点传输)

- 勾选方框并选择参数进行相应设置
- 远程IP地址: 对方IP地址 (例如, 192.168.55.2)
- 远程端口: 端口号 (填写以下内容 20002, 或者你可以自定义它)
- 监听端口: 端口号 (填写以下内容 20002, 或者你可以自定义它)
- UDP超时: 暂停 (填写默认值 10 以下)
- 字符超时: 数据超时 (填写默认值 24 之后)
- 最大数据包大小: 数据包大小 (填写以下默认值 256)
- 填写后, 单击“设置”。
- 右侧窗口UART-1可查看相关内部参数
串行UDP-组播传输模式: (一对多组播模式)

- 勾选方框并选择参数进行相应设置
- 远程IP地址: 接收IP地址 (倾听) 组播
- 远程端口: 接收端口 (倾听) 组播
- 组播IP地址: 发送IP地址 (倾听) 组播
- 组播端口: 发送端口 (倾听) 组播
- 链接模式: 模式选择, 0 是默认值, 1 是桥接模式. 只需使用默认值即可
- 注意: UART2设置与UART1相同, 有些主板没有UART2
- 本产品串口数据加载到网口上进行传输, 并且支持串口转网口、网口转串口.
问一个问题
感谢您的回复。 ✨