


1. パッケージ内容
空気 ユニット & 地面 ユニット

A赤外線ユニットアンテナ × 2

G丸型ユニットアンテナ× 2

空気 ユニット ケーブル

| いいえ. | インタフェース |
| 1,2,3 | イーサネット |
| 4,5 | S.バス, 写真のように, の 1セント デュポンコネクタの左からのピンはS.BUS信号です, の 3rd Gです. |
| 6,7 | テレメトリーシリアル, 写真のように, の 2nd GH1.25コネクタの左からのピンがRxです, の 3rd 送信です, の 6番目 Gです. (デフォルトではTTL, RS232/422の代替品) |
| 8 | PPM, 写真のように, の 1セント 左からのピンはPPM信号です, の 3rd Gです. |
| 9 | 力 |
地上ユニットケーブル

| いいえ. | インタフェース |
| 1,2,3 | イーサネット |
| 4,5 | S.バス, 写真のように, の 1セント 左からのピンがS.BUS信号, の 2nd 5V+です, の 3rd Gです. |
| 6,7 | シリアルUSB(デフォルトでは TTL-USB, RS232/422の代替品) |
| 8 | PPM |
| 9 | 力 |
2. 製品 説明
2.1. Pパラメータ
| パラメータ | 価値 |
| 周波数 | 1330~1450MHz |
| バンド幅 | 10メガヘルツ (アップリンク), 10メガヘルツ (ダウンリンク) |
| 力 | 33dBmの |
| 変調 | OFDM |
| 星座 | BPSK, QPSK, 16QAM |
| FEC | LDPC(1/2, 2/3, 3/4, 5/6) |
| デュプレックス | TDD |
| ダウンリンクのスループット | 2.3Mbps~8bps |
| アップリンクのスループット | 600kbps |
| 暗号化 | AES 256 |
| インタフェース | イーサネット, USB, TTL, RS232, RS422, PPM/S.BUS |
| 消費電力 | 18W(航空ユニット); 10W(地上ユニット) |
| レイテンシ | <300ミズ (カメラ依存) |
| 寸法 | 92.5*70.3*25ミリ |
| 重量 | 198グラム |
| 定格電圧・電流 | DC24V/1.2A (または6Sリチウム電池) |
| 使用温度 | -40℃ ~60℃ |
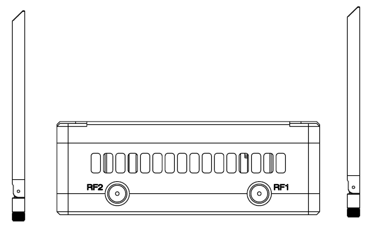
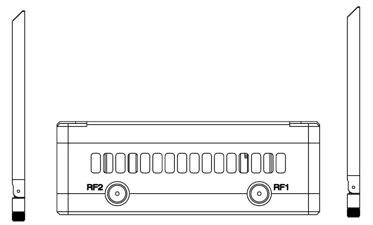
2.2. 空気 ユニット インターフェース

- J30Jコネクタ
電源/イーサネット/シリアル/PPM/S.BUS を提供する J30J-37 ピン コネクタです。.
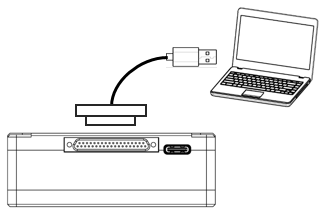
- USBポート
このポートをPCのUSBポートに接続します, ワイヤレスビデオリンクPCプログラムを使用してファームウェアをアップグレードし、航空ユニットのパラメータを設定します.

- バインドボタン
このボタンを長押しするとバインド操作が実行されます. 工場出荷前にすでに製本済み, ユーザーが再度バインドする必要はありません.
- LED
左から右へ: 電源インジケーター (1), イーサネットリンクインジケーター (2~4), UL/DL 無線リンクインジケーター (5~6) 航空ユニットには使用されません. バインドプロセス中は LED6 が点滅します。.

- RF1ポート
を接続します。 1セント 航空ユニットのアンテナをこのポートに接続.
- RF2ポート
2 番目の航空ユニットのアンテナをこのポートに接続します.

- ファン換気口
効果的な冷却を確保するために、このファンの通気口をふさがないでください。.
2.3. 地面 ユニット インターフェース

- J30Jコネクタ
電源/イーサネット/シリアル/PPM/S.BUS を提供する J30J-37 ピン コネクタです。.
- USBポート
このポートをPCのUSBポートに接続します, ワイヤレスビデオリンクPCプログラムを使用してファームウェアをアップグレードし、航空ユニットのパラメータを設定します.

- バインドボタン
このボタンを長押しするとバインド操作が実行されます. 工場出荷前にすでに製本済み, ユーザーが再度バインドする必要はありません.
- LED
左から右へ: 電源インジケーター (1), イーサネットリンクインジケーター (2~4), UL/DL 無線リンクインジケーター (5~6). バインドプロセス中は LED6 が点滅します。.

- RF1ポート
を接続します。 1セント 航空ユニットのアンテナをこのポートに接続.
- RF2ポート
2 番目の航空ユニットのアンテナをこのポートに接続します.

- ファン換気口
効果的な冷却を確保するために、このファンの通気口をふさがないでください。.
3. Sシステム 設定
3.1. 空気 ユニット インストール
目次
3.1.1. A彼は言いました インストール
航空ユニットのアンテナを RF ポートにネジで固定します.
注記:
- 機器の損傷を避けるために, ユニットの電源を入れる前にアンテナを取り付けてください.
- ドローンに航空ユニットを搭載する場合, 両方のアンテナがドローンのどの部分によってもブロックされていないことを確認してください。
- 両方のアンテナを取り付ける必要があります.
3.1.2. P電力供給
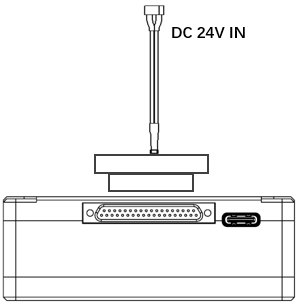
J30J コネクタを航空ユニットの J30J ポートに挿入し、バッテリー/電源をもう一方の端の電源ポートに接続します。.
注記:
- 機器の損傷を避けるために, ユニットの電源を入れる前にアンテナを取り付けてください.
- 推奨定格電圧/電流はDC24V/1.2Aです。 (または6Sリチウム電池).
3.1.3. Cカメラに接続
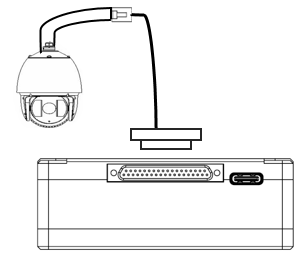
IP カメラのビデオ出力ポートを航空ユニットのイーサネット ビデオ入力ポートに接続します。.
3.1.4. Cフライトコントローラーに接続 (RC & テレメトリー)
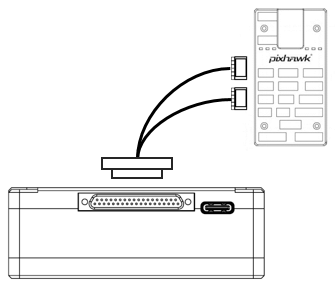
J30J コネクタを航空ユニットの J30J ポートに挿入し、シリアル ケーブルのもう一方の端をフライト コントローラーのテレメトリ ポートに接続します。.
J30J コネクタを航空ユニットの J30J ポートに挿入し、RC ケーブルのもう一方の端をフライト コントローラーの PPM/S.BUS ポートに接続します。.
3.2. Gラウンドユニットの取り付け
3.2.1. アンテナの設置
地上ユニットのアンテナをRFポートにネジで固定します.
注記:
- 機器の損傷を避けるために, ユニットの電源を入れる前にアンテナを取り付けてください.
- 両方のアンテナを取り付ける必要があります.
- 動作中にアンテナが地面に対して垂直になるように調整してください.
3.2.2. P電力供給
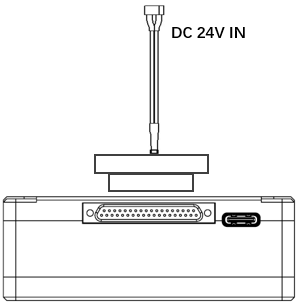
電源の電源コネクタを地上ユニットの電源ポートに挿入します。
N大手:
- 推奨定格電圧/電流はDC12V/1.2Aです。 (または3Sリチウム電池).
- 機器の損傷を避けるために, ユニットの電源を入れる前にアンテナを取り付けてください.
3.2.3. テレメトリー接続
J30J コネクタを地上ユニットの J30J ポートに挿入し、付属のシリアル ケーブルのもう一方の端を地上制御ステーションのテレメトリ ポートに接続します。.
注記:
- 地上局のボーレートとワイヤレスビデオリンクモジュールのボーレートが同じになるように設定されていることを確認します。.
- シリアル ケーブルの順序がワイヤレス ビデオ リンク モジュールのインターフェイス定義と一致していることを確認します。.
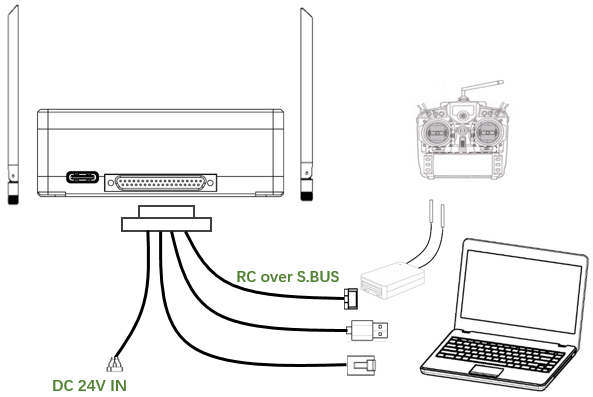
3.2.4. Cリモコンに接続
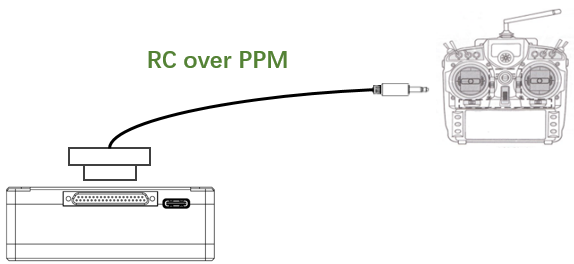

PPMモードの使用: 付属のRCケーブルのトレーナーポートコネクタをリモコンのトレーナーポートに差し込み、J30Jコネクタを地上機のJ30Jポートに差し込みます。. S.BUSモードの使用: J30Jコネクタを地上ユニットのJ30Jポートに差し込みます。, もう一方の端を S.BUS 受信機に接続します, S.BUS受信機は送信機と無線で通信します。
N大手:
- RC ケーブルのピン配列がワイヤレス ビデオ リンク モジュールのインターフェイスのピン配列と一致していることを確認します。.
- S.BUS受信機を使用する場合, 受信機の動作周波数帯域とワイヤレスビデオリンクモジュールの動作周波数帯域の間に十分なガードバンドが必要です。
3.2.5. Sビデオ出力をセットアップする
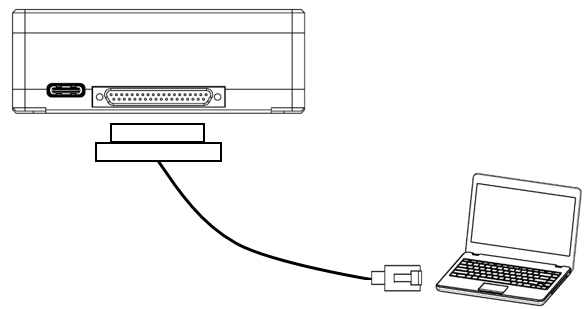
J30J コネクタを地上ユニットの J30J ポートに挿入し、付属のイーサネット ケーブルのもう一方の端を PC または地上制御局に接続します. カメラとPCのIPアドレスが同じサブネット内にあることを確認してください.
3.2.6. 使用 ワイヤレスビデオリンク システム

- 航空ユニットにアンテナを取り付ける.
- IP カメラの出力を航空ユニットのイーサネット ポートに接続します.
- フライト コントローラーの PPM/S.bus ポートを航空ユニットの RC ポートに接続します。.
- フライト コントローラーのテレメトリ ポートを航空ユニットのシリアル ポートに接続します。.
- DC24V電源を航空ユニットの電源ポートに接続し、電源を入れます。.
- 最新のファームウェアが必要な場合, USB ケーブルを使用して航空ユニットを PC に接続し、ワイヤレス ビデオ リンク PC プログラムを実行してユニットのファームウェアを最新のものにアップグレードします。.
- アンテナを地上ユニットに設置する.
- 送信機をトレーナーモードに設定します。. PPMモードを使用する場合, 地上ユニットのリモコンインターフェイスをリモコンのトレーナーポートに接続します。. S.BUSモードを使用する場合, S.BUS受信機は付属のケーブルを使用して地上ユニットに接続する必要があります, S.BUS受信機と送信機間の接続を確立する必要があります.
- テレメトリ リンクを使用するには、シリアル 2-USB アダプタを介して地上管制局の USB ポートを地上ユニットのシリアル ポートに接続します。.
- GCS または PC のイーサネット ポートを地上ユニットの RJ45 コネクタに接続して、IP ビデオ/テレメトリを取得します。 (イーサネット経由のテレメトリ).
- 地上ユニットの電源を入れます.
- 最新のファームウェアが必要な場合, USB ケーブルを使用して地上ユニットを PC に接続し、ワイヤレス ビデオ リンク PC プログラムを実行してユニットのファームウェアを最新のものにアップグレードします。.
- ダウンリンクとアップリンクが確立された後, 地上ユニットの両方の LED が点灯します.
4. ソフトウェア
4.1. インストール
ワイヤレスビデオリンクはプログラムインストールファイルを提供します, プログラムファイル名: ワイヤレス ビデオ リンク Wireless App Setup.exe. インストーラーアイコンは以下の通り:

インストーラーをダブルクリックしてインストールし、プログラムのインストール ディレクトリをカスタマイズします。. 設定後, 「次へ」をクリックして次のステップに進みます. インストールをキャンセルするには, 「キャンセル」をクリックします.
デスクトップショートカットが必要な場合は、「デスクトップショートカットを作成」にチェックを入れます。. チェックが入っていない場合, デスクトップショートカットは作成されません. 設定後, 「次へ」をクリックして次のステップに進みます. 前のステップに戻るには, 「戻る」をクリックします. インストールをキャンセルするには, 「キャンセル」をクリックします.
「インストール」をクリックしてインストールを進めます. 前のステップに戻るには, 「戻る」をクリックします. インストールをキャンセルするには, 「キャンセル」をクリックします.
注記: ウイルス対策ソフトウェアを無効にしてください, そうしないと、ドライバーのインストール中にウイルス対策ソフトによってドライバーのインストールが妨げられる可能性があります。.
この時点で, ソフトウェアのインストールが完了し、ドライバーのインストールが完了しました.
4.2. ソフトウェア 言語
ワイヤレスビデオリンク PC ソフトウェアは中国語と英語の両方をサポートします.
PC のオペレーティング システムが中国語の場合、ソフトウェアは中国語で表示されます。, それ以外の場合、ソフトウェアは英語で表示されます.
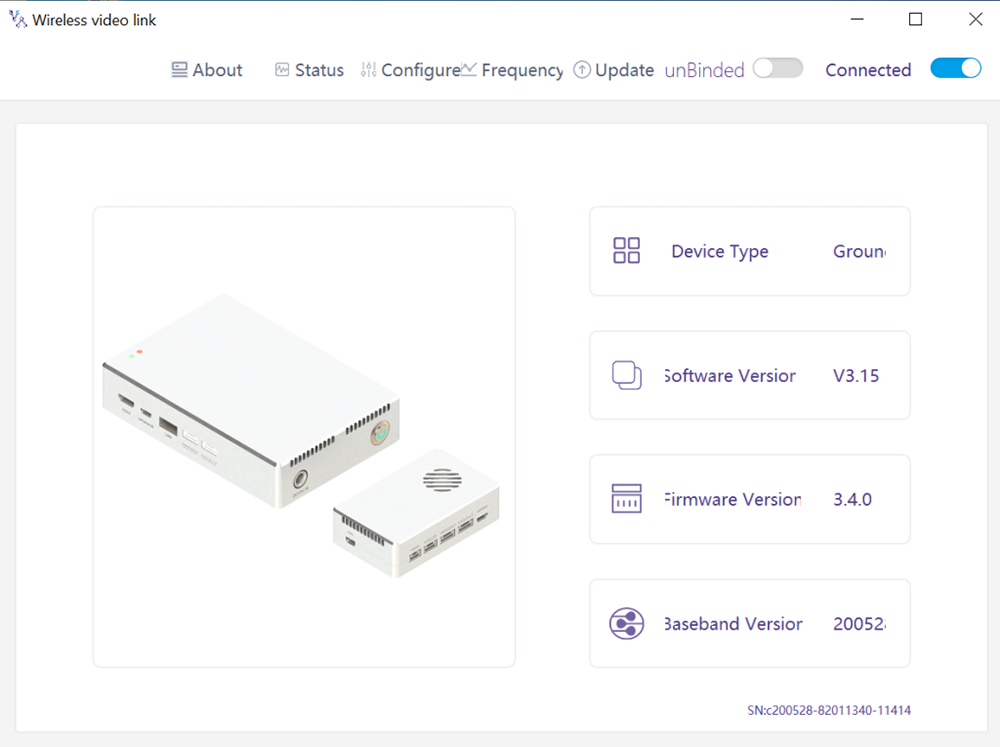
デバイスがコンピュータに正しく接続されていない場合, ワイヤレス ビデオ リンク PC ソフトウェアでは次の図が表示されます:

デバイスがコンピュータに正しく接続されている場合, ワイヤレス ビデオ リンク PC ソフトウェアでは次の図が表示されます:
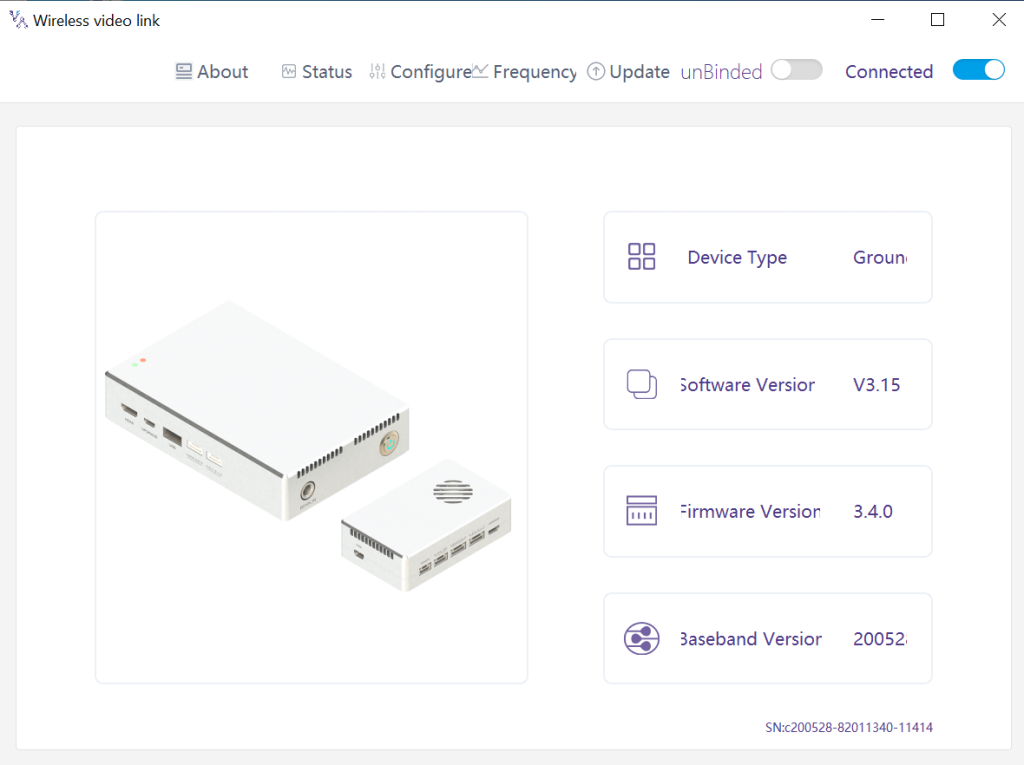
4.3. デバイス情報
ホームページの情報: デバイスの種類, ソフトウェアバージョン, ファームウェアのバージョン, とベースバンドバージョン.
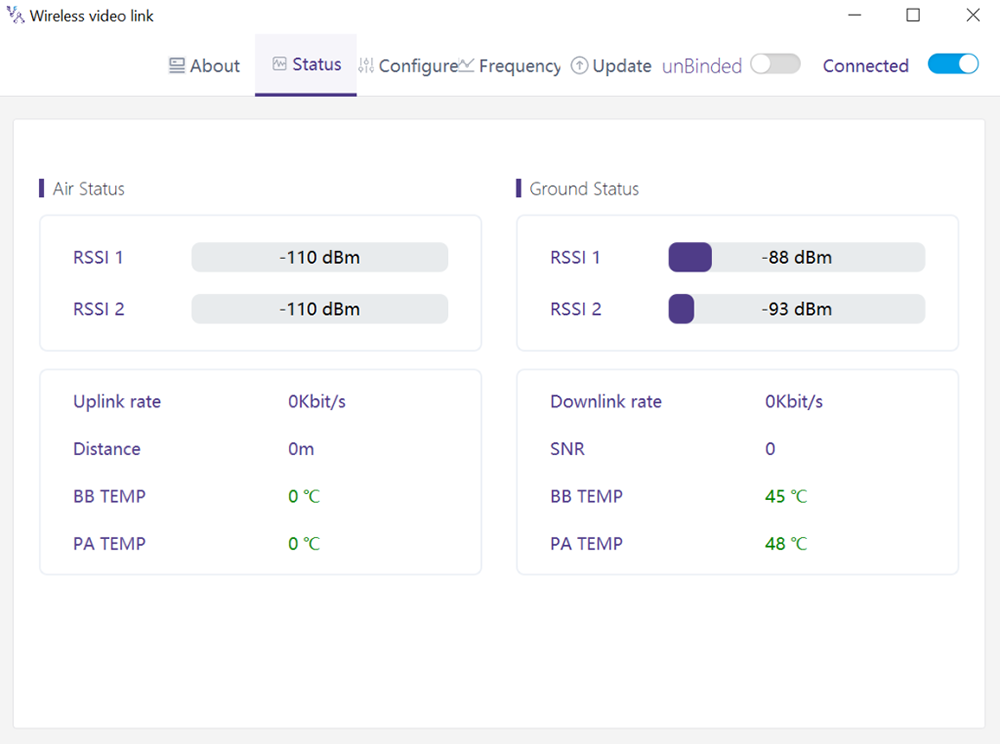
4.4. 状態
「ステータス」ページのセクションで航空ユニットと地上ユニットのステータス情報を確認します。:
空気: RSSI 1 & RSSI 2, アップリンク速度, 距離, BB温度, ペンシルベニア州温度.
地面: RSSI 1 & RSSI 2, ダウンリンク速度, SNR, BB温度, ペンシルベニア州温度.
4.5. 構成
設定を変更するには, デバイスをバインドする必要があり、航空ユニットと地上ユニットの間のワイヤレス接続を確立する必要があります.
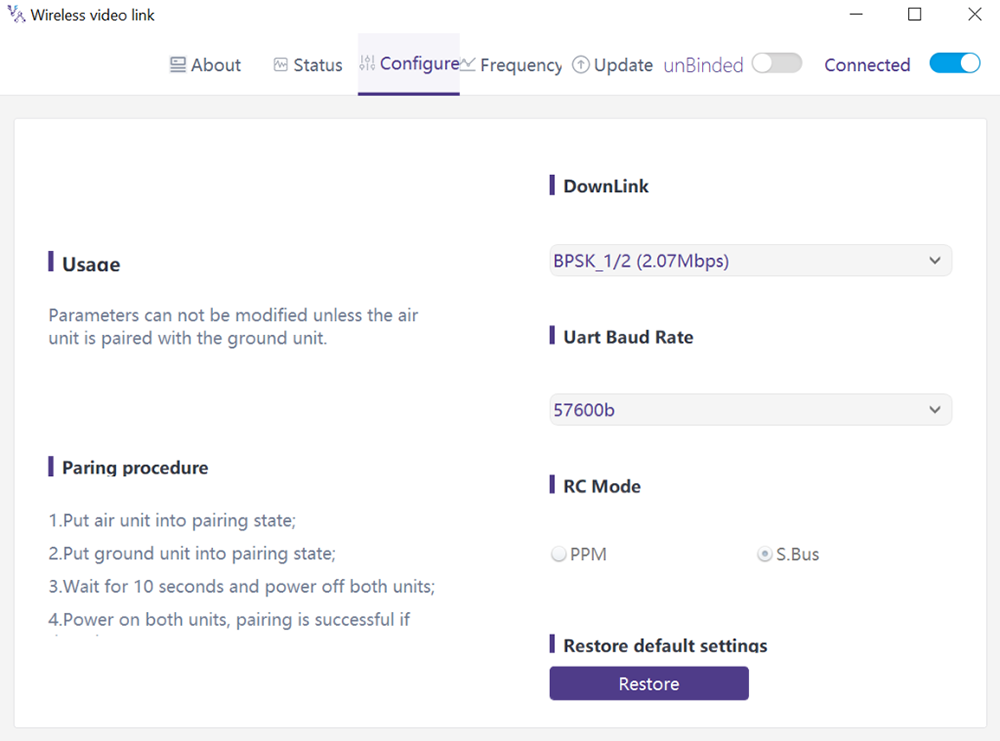
4.5.1. ダウンリンクモードの設定
ダウンリンクモードを変更するには, デバイスをバインドする必要があり、航空ユニットと地上ユニットの間のワイヤレス接続を確立する必要があります
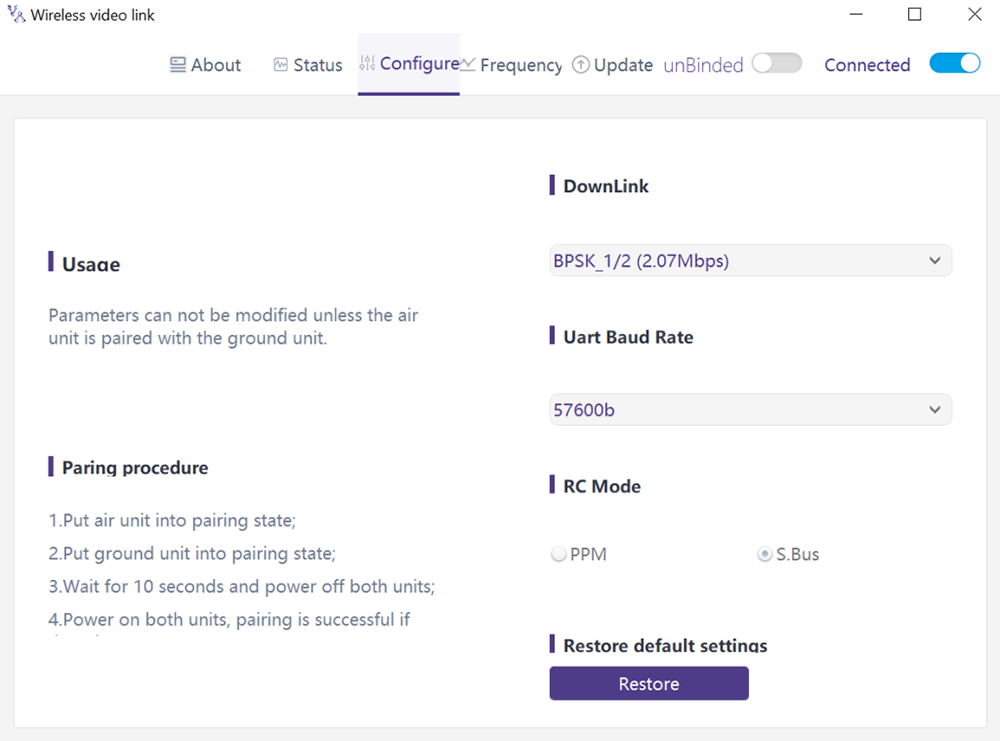
がある 8 ドロップダウン メニューからのダウンリンク モードのオプション (次のスクリーンショットを参照してください):
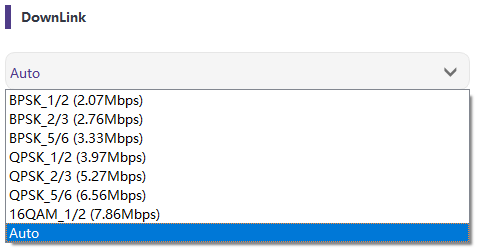
オート選択時, 変調方式はリアルタイムの信号品質に基づいて動的に適応されます.
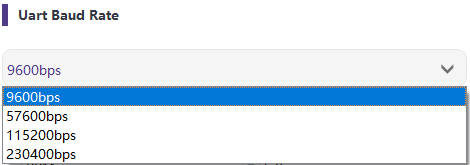
4.5.2. ボーレート設定
がある 4 シリアルポートのボーレートのオプション (次のスクリーンショットを参照してください).
4.5.3. リモート 詐欺トロール モード 構成
リモートコントロールモードには 2 つのオプションがあります, PPMとS.BUS (次のスクリーンショットを参照してください).

4.5.4. 復元する デフォルト 設定
「復元」をクリックしてデフォルト設定を復元します.
4.6. 周波数
周波数のページで周波数関連の情報・パラメータを確認・設定できます.
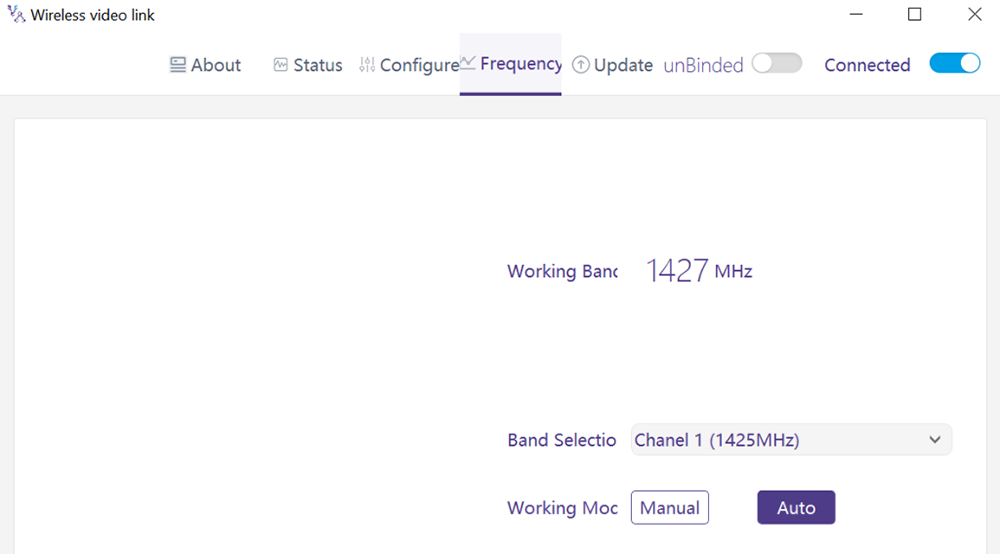
4.6.1. 周波数動作モード
作業モード:マニュアル, 自動.
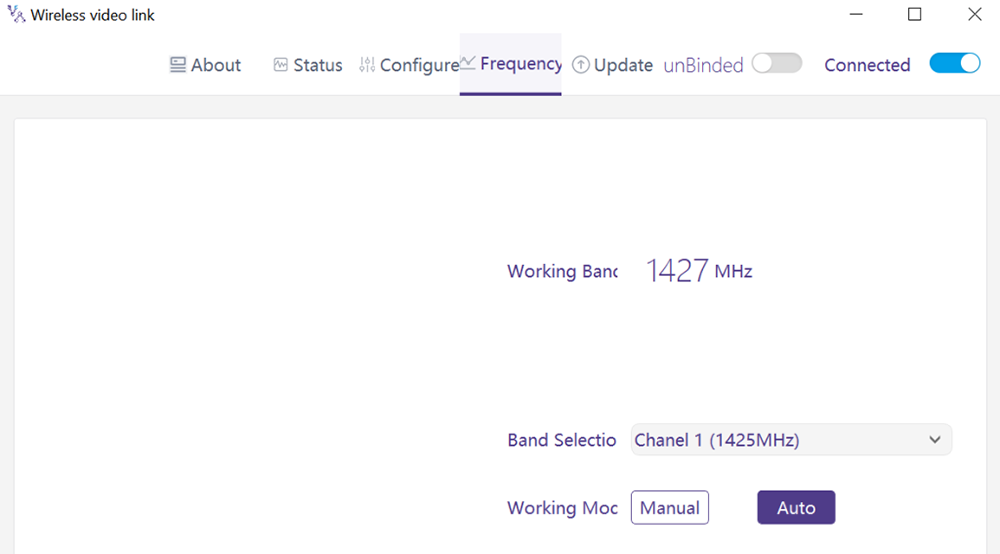
マニュアルモード: ユーザーが手動で動作周波数を選択します.
カーファッション: システムは周波数スキャンに基づいて動作周波数を選択します。.
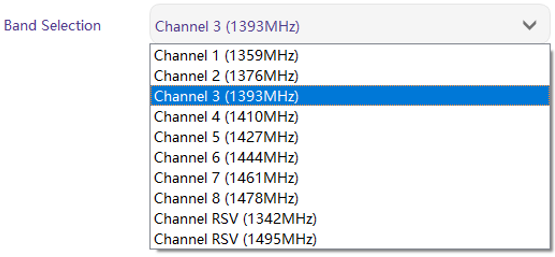
4.6.2. 周波数の選択
マニュアルモード時, 動作周波数はドロップダウン メニューから選択できます. 製品仕様に従ってチャンネルを選択してご使用ください。 (1330~1450MHz).
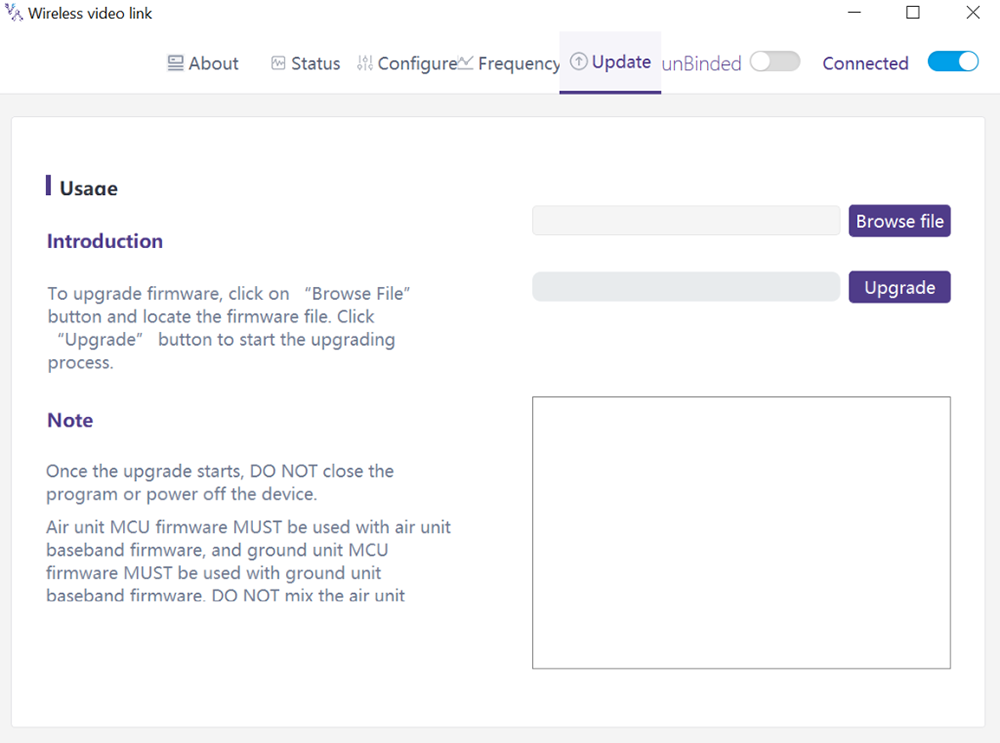
4.7. アップグレード
注記: 航空ユニットと地上ユニットは、USB ケーブルを使用してワイヤレスビデオリンクに接続する PC ソフトウェアを個別にアップグレードする必要があります.
アップグレードページに移動します. アップグレードファイルを選択します, 紫色の「アップグレード」ボタンをクリックしてアップグレードします。.
4.8. ウェブページ管理
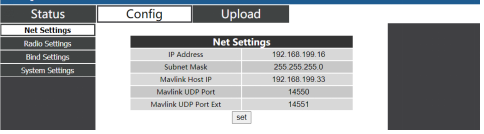
USB経由でのPCアプリ管理に加えて, Ethernet経由のWebページ管理もサポートされています. PCと航空ユニット/地上ユニットをイーサネットケーブルで直接接続, PCのIPアドレスを次のように設定します 192.168.199.33/24, そして訪問してください 192.168.199.18 (航空ユニット)/192.168.199.16 (地上ユニット) ウェブページを通じて.
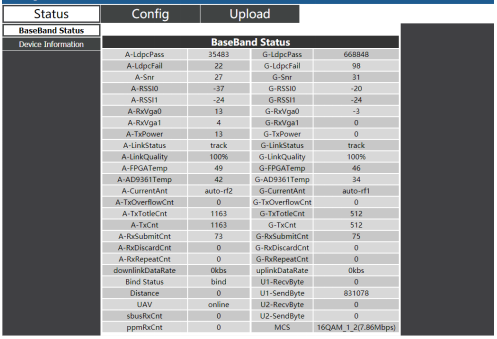
「ステータス」→「ベースバンドステータス」の下, RSSIなどの詳細情報あり, SNR, 送信パワー, LDPC 統計, テレメトリ統計, 等.
ステータス下 デバイス情報, SNとファームウェアバージョンの情報があります.

ConfigàNet 設定の下, ユニット自体のIPアドレスがある, テレメトリ宛先 IP アドレスと UDP ポート, これらのパラメータはすべてユーザーのリクエストに応じて変更できます.
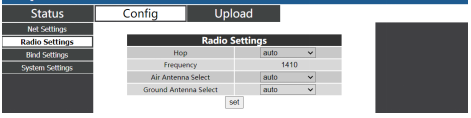
ConfigàRadio 設定の下, ホップがある, 頻度, アンテナ選択を設定可能. ホップがオートの場合, ユーザーは頻度を設定する必要がない/設定できない, システム自体が使用する最適な周波数を動的に選択します, 言い換えると, ホップが手動の場合, ユーザーは周波数を手動で設定できます.
Config Bind 設定の下で, バインドプロセスは、物理的なバインドボタンの代わりにバインドをクリックすることでトリガーできます。.

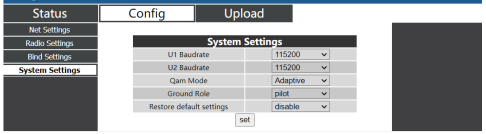
構成システム設定の下で, U1/U2の2つのシリアルポートのボーレートを設定可能. QAMモードがアダプティブに設定されている場合, ユニットはリアルタイムの信号品質に基づいて変調方式を動的に変更します. パイロットの役割は双方向送信ですが、オブザーバーはダウンリンク データのみを持ちます。.
アップロードの下で アップロード, ブラウザで最初にアップグレードするファイルを選択します, 次に、「送信」をクリックしてプロセスをトリガーします.

5. アプリケーション
5.1. アプリケーション の リモコン
ワイヤレスビデオリンクモジュールはPPMおよびSをサポート. バスプロトコル.
PPMモードを使用する場合, 地上ユニットと送信機のトレーナー ポートを接続するには、ワイヤレス ビデオ リンク標準 PPM ケーブルを使用してください。.
Sの場合. BUSモードを使用します, 追加のS.BUS受信機が必要です. 地上ユニットは受信機に接続されています. それからS. BUS受信機はリモコンとの無線通信を確立します.
どちらのモードでも、送信機を対応する動作モードに設定する必要があります。.
Sの場合. BUS受信機を使用, ワイヤレスビデオリンクモジュールの動作周波数とは異なる受信機を使用してください。.
PPMモード使用時, 航空ユニットはフライト コントローラーの PPM RC ポートに接続する必要があります.
Sのとき. BUSモードを使用します, 航空ユニットは DSM/S に接続する必要があります. フライトコントローラーのBUS RCポート.
5.1.1. フラスキー リモート コントローラ
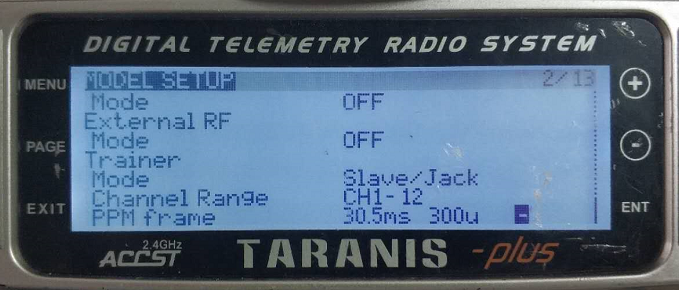
- PPMモード
モデルのセットアップ – トレーナーモード: モードがスレーブ/ジャックに設定されている場合, 送信機は PPM モードになります.
モデルのセットアップ – 内部RF: オフに設定する必要があります, そしてS. バスモードは無効になります.
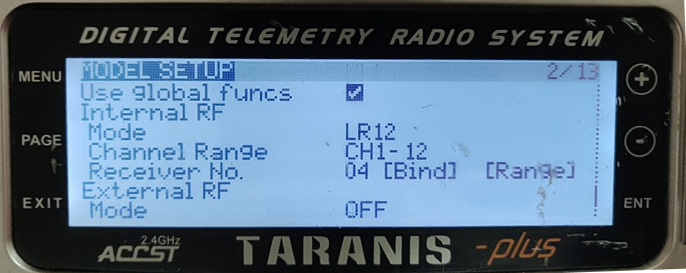
- S.BUSモード
モデルのセットアップ – 内部RF: LR12、D8, D16, オフ。さまざまなパラメータの設定は受信機の設定に従います. OFFに設定されている場合, S. バスモードは無効になります.
5.1.2. 双葉 リモート コントローラ
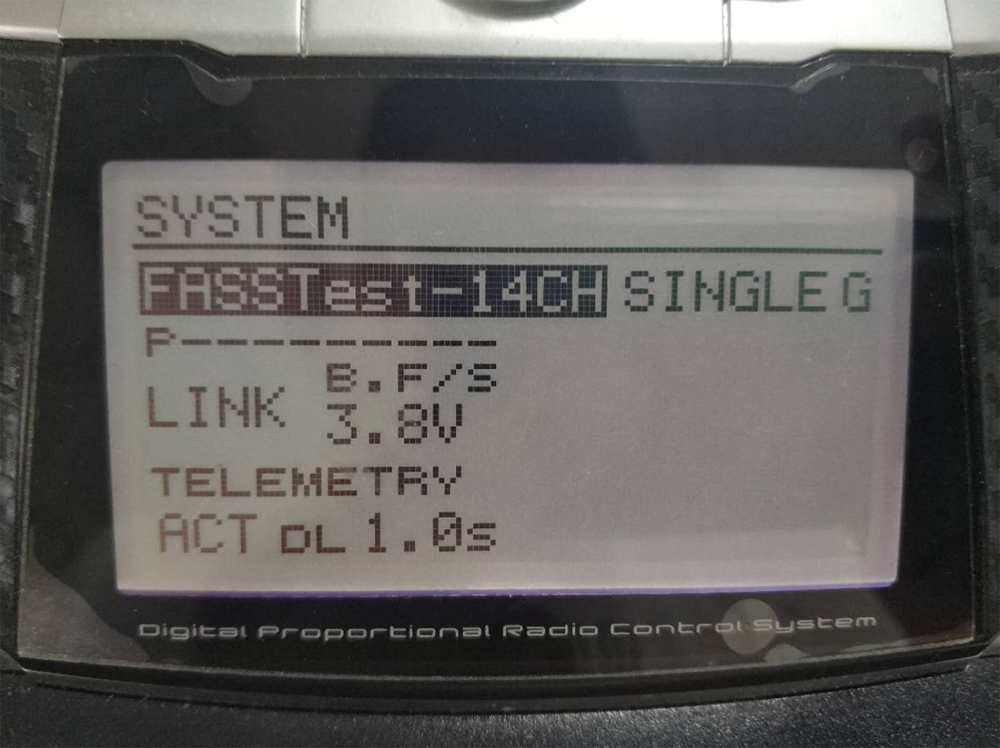
- S.BUSモード
連携メニュー – システム: FASSTest-14CH, FASSTest 12CH, マルチを保持, 7CHを保持, S-FHSS. さまざまなパラメータの設定は受信機の設定に従います.
- PPMモード
ワイヤレス ビデオ リンク標準 PPM ケーブルは、Futaba トレーナー ケーブルへの接続に使用されます。 (一端はFutabaコントローラのトレーナーポートに接続されています, もう一方の端は 3.5 mm コネクタです). PPM モードは追加の設定なしで直接使用できます.
5.2. テレメトリー 繋がり
航空ユニットのテレメトリポートは「TELEM1」に接続します フライトコントロールのポート(ピクホーク4).
5.3. 得る ライブ ビデオ
QGC/VLC などのメディア プレーヤーで RTSP 経由でリアルタイム ビデオを取得します. PCとカメラのIPアドレスが同じサブネット内にあることを確認してください.
6. 注意事項
6.1. リンク パフォーマンス
- RFケーブルコネクタ/アンテナコネクタチェック
フライト前, アンテナがモジュールに接続されているかどうかを確認してください. アンテナが接続されていない状態でモジュールを実行すると、通信範囲が非常に短くなり、モジュールが損傷する可能性があります。. すべてのRFコネクタの接続を確認することをお勧めします。. 接続が緩んでいると通信範囲が大幅に低下する可能性があります.
- アンテナの配置
ドローンがどの位置にいても安定するように 2 つのエア アンテナを配置します。, 少なくとも 1 つのアンテナが地上局からのペイロードによってブロックされていないこと.
ドローンがフルスロットルで飛行する場合, 前かがみになります. ドローンがフルスロットルで前進するときにエアアンテナが地面に対して垂直に近くなるように設置してください.
- バッテリー残量
電池が消耗すると受信性能が低下します, たとえそれがまだユニットに電力を供給するかもしれないとしても.
6.2. ラジコン リンク & リモート コントローラ
ワイヤレスビデオリンクモジュールのRCリンクは、PPMおよびS.BUSプロトコルをサポートします。. PPMプロトコルを使用する場合, 送信機をPPMモードに設定し、送信機の無線送信をオフにする必要があります。. S.BUSプロトコルを使用する場合, 送信機に接続された受信機の無線動作周波数は、無線ビデオリンクモジュールの動作周波数とは異なる周波数帯域で動作し、一定の絶縁保証がなければなりません。.
ワイヤレスビデオリンクモジュールのRCリンクを使用しない場合, 送信機の RC リンクを使用する場合は、送信機のリモート リンク動作周波数に注意する必要があります。. ワイヤレスビデオリンクモジュールの使用周波数と同じ周波数帯域にある場合, お互いに干渉してしまいますので.
ワイヤレスビデオリンクシステムを使用する場合、送信機または受信機のワイヤレスリンクによるワイヤレスビデオリンクモジュールへの干渉を回避します。.
6.3. ファームウェアのアップデート
ファイルをアップグレードする: 航空ユニット用のFPGAアップグレードファイル, 地上ユニット用のFPGAアップグレードファイル, 航空ユニット用 MCU1 アップグレード ファイル, 地上ユニット用の MCU1 アップグレード ファイル, 航空ユニット用 MCU2 アップグレード ファイル, 地上ユニット用 MCU2 アップグレード ファイル.
アップグレード ファイルはワイヤレス ビデオ リンク PC ソフトウェアを使用してアップグレードされます. アップグレード中, 電源をオフにすることはできず、同時に USB ケーブルが正常に接続されていることを確認する必要があります。. アップグレードが失敗した場合, 電源をオフにできません, もう一度直接アップグレードしてみてください. さもないと, ファームウェアの書き込みに特別な書き込みツールを使用するには、当社に返送する必要があります。.
6.4. バインド ああ操作
「バインド」は航空ユニットと地上ユニットをペアリングするために使用されます.
航空ユニットと地上ユニットをペアリングするには:
- 航空ユニットと地上ユニットの両方の電源が入っています.
- 空中ユニットと地上ユニットを接続する.
- 航空ユニットの物理バインドボタンを押します, 最後の5秒以上。バインドボタンの横にある LED ライトが緑色に点滅します。, バインディング状態にあることを示します.
- 地上ユニットの物理バインドボタンを押す, 最後の5秒以上。バインドボタンの横にある LED ライトが緑色に点滅します。, バインディング状態にあることを示します.
- 地上ユニットのリンク表示LEDが常時点灯の場合, これは空軍と地上軍が連携していることを示しています。.
注記:
(1) モジュールが異なるファームウェアバージョンにバインドされている場合, バインド操作が失敗する可能性があります.
(2) 航空ユニットまたは地上ユニットのプログラムが正しく書き込まれていない場合, 航空ユニットを地上ユニットに焼き付けるなど, 間違った航空ユニットと地上ユニットの間でバインド操作を実行する, バインド操作は失敗します.
(3) ユニットは工場出荷前にすでに結合されています, お客様は開梱後に再度バインドする必要はありません.
(4) ユニットを工場出荷時の設定に復元した場合, 再度バインドが必要です.
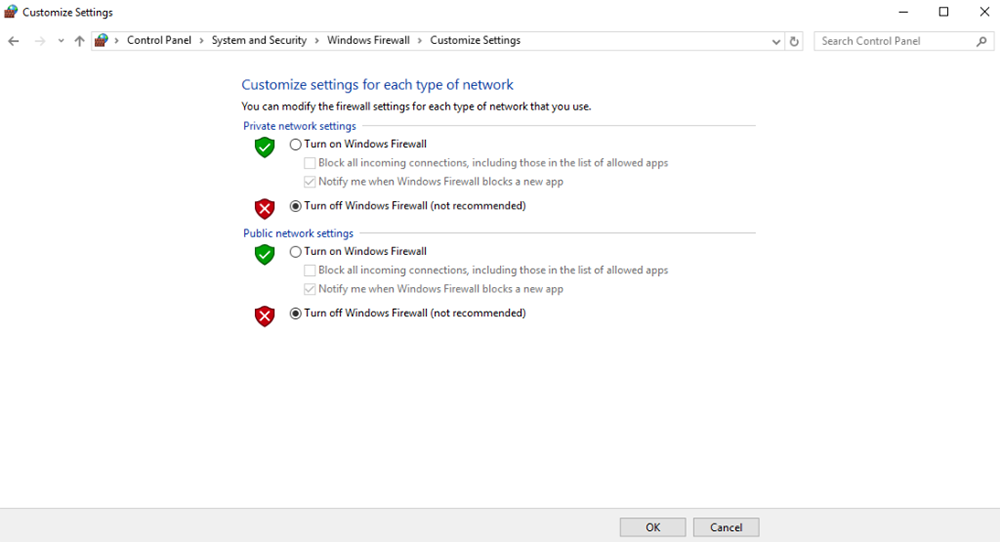
6.5. PC Windows ファイアウォール
ビデオやテレメトリがブロックされた場合に備えて、PC ファイアウォールが無効になっていることを確認してください. ここではWindows10オペレーティングシステムを参考にします. パス: Control Panel\System and Security\Windows Firewall\Customize Settings.
プライベート/パブリック ネットワーク設定を「Windows ファイアウォールをオフにする」に設定します。’ 以下のように, 「OK」をクリックします.
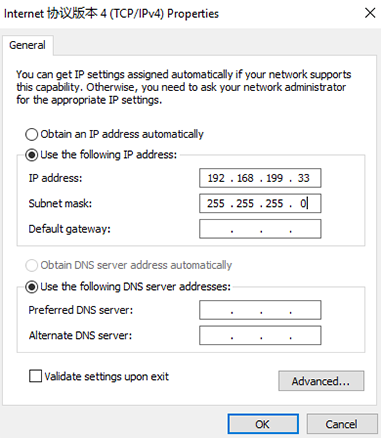
6.6. PCのIPアドレスを設定する
PCでビデオを視聴する場合は、PCのIPアドレスを正しく設定する必要があります, IPアドレスは以下の手順で設定できます:
Double click ‘Ethernet’ at Control Panel\Network and Internet\Network Connections,

「インターネットプロトコルのバージョン」をダブルクリックします 4(TCP/IPv4)』, 以下のようにPCのIPアドレスを設定します, 「OK」をクリックします’ 仕上げる.
6.7. J30J-37 コネクタのピン定義
| 名 | ピン |
| 力 | 1,2,20 |
| GND | 3,10,15,21,22,29,31 |
| イーサネット1 TX+ | 7 |
| イーサネット1送信- | 26 |
| イーサネット1 RX+ | 6 |
| イーサネット1 RX- | 25 |
| イーサネット2 TX+ | 5 |
| イーサネット2送信- | 24 |
| イーサネット2 RX+ | 4 |
| イーサネット2 RX- | 23 |
| イーサネット3 TX+ | 8 |
| イーサネット3送信- | 27 |
| イーサネット3 RX+ | 9 |
| イーサネット3 RX- | 28 |
| SBUS_V | 11 |
| PPM | 12 |
| GPS_SYNC | 13 |
| 予約済み | 14 |
| 232TX1 または 422Y2 | 16 |
| 232RX1または422A2 | 17 |
| 232TX2または422Y1 | 18 |
| 232RX2または422A1 | 19 |
| SBUS1 | 30 |
| SBUS2 | 32 |
| 予約済み | 33 |
| 422Z2 または TTLTX1 | 34 |
| 422B2 または TTLRX1 | 35 |
| 422Z1またはTTLTX2 | 36 |
| 422B1 または TTLRX2 | 37 |
7. FAQ
| Q1: どうやって ワイヤレスビデオリンク モジュール供給電源? |
| 航空ユニット: 直流, 電源範囲: 9-26V, 24Vの使用を推奨. |
| 地上ユニット: 直流, 電源範囲: 9-26V, 24Vの使用を推奨. |
| 第2四半期: できる? ワイヤレスビデオリンク アンテナを取り付ける前にモジュールの電源を入れてください? |
| 電源を入れる前にアンテナを取り付ける必要があります. |
| Q3: アンテナは何本ありますか ワイヤレスビデオリンクのエアユニットを取り付ける必要があります? |
| 2 つのアンテナを設置する必要がある. |
| Q4: アンテナは何本ありますか ワイヤレスビデオリンクの地上ユニットを設置する必要があります? |
| 2 つのアンテナを設置する必要がある. |
| Q5: ドローンの制御にさまざまな種類の送信機を使用できますか?? |
| はい, コーチポート経由で標準 PPM 信号を出力するだけです, またはSを使用してください. バス受信機. |
| Q6: ドローンに 2 つの航空ユニットを搭載できますか? |
| いいえ, ドローンは航空ユニットを 1 つだけ持つことができます. |
| Q7: 受信側に地上ユニットを 2 台設置できますか? |
| PTP システムは地上ユニットを 1 台だけ設置できます; ptmp システムは複数の地上ユニットをサポートします. |
| Q8: アップリンクの場合はどうなるか/ダウンリンク LEDインジケーターが点灯しない? |
| 次の手順に従ってください: |
| 1) 航空および地上ユニットの電源が正常であることを確認してください. |
| 2) 航空ユニットと地上ユニットのアンテナの設置が正常であることを確認してください: アンテナがブロックされているかどうか; アンテナの接続が緩んでいないか; RF ケーブルとポートが締め付けられていないかどうか; |
| 3) Taiysnc PC アプリを使用して、地上ユニットの送信周波数が航空ユニットの受信周波数と一致しているかどうかを確認します。. |
| 4) Taiysnc PC アプリで地上ユニットの TX 電力を確認する. |
| 5) 上記の手順で問題が解決できない場合, ワイヤレス ビデオ リンクのテクニカル サポート スタッフにお問い合わせください。. |
| Q9: テレメトリ接続をセットアップできません きちんと? |
| 次の手順に従ってください: |
| 1) リンク状態が正常か確認してください. |
| 2) フライトコントローラーと航空ユニット間のシリアルテレメトリーケーブル接続が正しいか、地上ユニットと地上局間のシリアルテレメトリーケーブル接続が正しいかどうかを確認してください。. |
| 3) ボーレートが同じかどうかを確認する. |
| 4) 上記の手順で問題が解決できない場合, ワイヤレス ビデオ リンクのテクニカル サポート スタッフにお問い合わせください。. |
| Q10: RC接続が設定できない きちんと? |
| 次の手順に従ってください: |
| 1) リンク状態が正常か確認してください; |
| 2) フライトコントローラーと航空ユニット間のRC接続が正しいか、地上ユニットと送信機間のRC接続が正しいか確認してください。; |
| 3) PPMモードを使用する場合, 送信機のモード設定を確認してください; Sを使用する場合. バスモード, 受信機と送信機の設定を確認してください; |
| 4) 航空地上ユニットのRC接続が正しいか確認してください。. 標準ケーブルを提供します. 自分で作るなら, ピンを確認してください; |
| 5) ワイヤレスビデオリンクアプリでRCモードが正しく設定されているかどうかを確認してください; |
| 6) 上記の手順で問題が解決できない場合, ワイヤレス ビデオ リンクのテクニカル サポート スタッフにお問い合わせください。. |
| Q11: ビデオ出力がない場合はどうすればよいですか? |
| 次の手順に従ってください: |
| 1) リンク状態が正常か確認してください; |
| 2) Ethernetケーブルとカメラが正常か確認してください; |
| 3) RTSPアドレスが正しいか確認してください; |
| 4) PCのIPアドレスとカメラのIPアドレスが同じサブネット内にあるかどうかを確認してください。; |
| 4) 上記の手順で問題が解決できない場合, ワイヤレス ビデオ リンクのテクニカル サポート スタッフにお問い合わせください。. |
| Q12: ビデオに歪みが生じた場合はどうすればよいですか? |
| 次の手順に従ってください: |
| 1) ダウンリンクモード設定がビデオビットレートより大きいかどうかを確認してください; |
| 2) 航空ユニットケーブルのイーサネット接続が信頼できるかどうかを確認してください; |
| 3) 地上ユニットのイーサネットケーブルの接続は確実か; |
| 4) 干渉があるかどうかを確認してください, 必要に応じて動作周波数を変更します; |
| 5) 干渉がなければ, 通信リンクの限界距離に達したかどうか; |
| 6) 上記の手順で問題が解決できない場合, ワイヤレス ビデオ リンクのテクニカル サポート スタッフにお問い合わせください。. |
| Q13: モジュールの伝送距離が予想より短かった場合はどうなりますか? |
| 次の手順に従ってください: |
| 1) アンテナと RF ケーブルが正しく取り付けられているかどうかを確認し、Falcon アクセサリが付属しているかどうかを確認してください。. |
| 2) エアアンテナが両方ともペイロードによってブロックされていないことを確認してください。, アンテナ近くの地上ユニットに明らかな障害物がない, 航空ユニットと地上ユニットのアンテナは地面に対して垂直です. |
| 3) モジュールがフル RF 出力で動作するかどうかを確認してください。. |
| 4) ダウンリンクモードの設定が適切かどうかを確認してください, 高スループットのダウンリンク モードにより、伝送距離が大幅に短縮されます。. |
| 5) 使用周波数が明らかに干渉していないか確認してください。. |
| 6) 飛行中に上空と地上ユニットの間に重大な障害物がないか確認してください, 複雑な地理的環境も伝送距離に影響します。. |
| 7) 上記の手順で問題が解決できない場合, ワイヤレス ビデオ リンクのテクニカル サポート スタッフにお問い合わせください。. |
質問する
ご回答をありがとうございました。 ✨