






מודול בקרת טיסה למעקב בינה מלאכותית עבור רחפנים FPV
מודול מעקב בינה מלאכותית זיהוי חכם כולל בקרת טיסה דו-באחד עבור מל"טים FPV
תוכן העניינים
סקירה כללית
ה זיהוי חכם של מודול מעקב בינה מלאכותית עם בקרת טיסה משולבת הוא פתרון שני באחד מהפכני שתוכנן במיוחד עבור רחפני FPV ויישומי מל"טים הדורשים מעקב אוטונומי, זיהוי מטרות, ושליטה חכמה. על ידי שילוב אלגוריתמים מתקדמים של בינה מלאכותית עם מובנה מערכת בקרת טיסה מבוססת PX4, מודול קומפקטי זה מציע למשתמשים שדרוג רב עוצמה אך חסכוני מבקרי טיסה מסורתיים.
בניגוד למערכות FPV קונבנציונליות הדורשות מספר רכיבים למעקב אחר תמונות, ייצוב טיסה, וניווט, יחידת הכל-באחד הזו משתלבת זיהוי תמונה בינה מלאכותית, מעקב אחר אובייקטים, ו ניהול בקרת טיסה למכשיר קל משקל של 15 גרם. זה אידיאלי עבור מפתחי מזל"טים, אינטגרטורים של מערכות, וחובבים שדורשים מעקב מדויק, תגובת חביון נמוכה במיוחד, ו קלות ההתקנה ללא צורך בהתקנה מורכבת או הכשרה מיוחדת.
המודול תומך מצלמות אנלוגיות של CVBS, מה שהופך אותו לתואם למגוון רחב של מצלמות FPV ומצלמות מעקב. עם מנוע AI מובנה שלו, זה יכול לזהות, לנעול, ולעקוב אחר מטרות אנושיות וכלי רכב בזמן אמת - שמירה על מיקוד עקבי גם בתנאים מאתגרים כמו תנועה מהירה או שינוי אור. מערכת המעקב החכמה מתאימה אוטומטית את מיקום הטיסה והכיוון על סמך האובייקט הנעול, הבטחת מרדף חלק.
בקר טיסה למעקב בינה מלאכותית זה תוכנן עבור מעקב אחר מטרות של מזל"ט, בדיקה אוטונומית, שיפור מירוצי FPV, ו יישומים טקטיים כגון סיור, פַּטרוֹל, ונעילת מטרות. זה מייצג עידן חדש של קומפקטי, יָעִיל, ומערכות בקרת מל"טים חכמות.
תכונות עיקריות
-
עיצוב שני באחד
-
משלב מעקב אחר אובייקטים בינה מלאכותית ומערכת בקרת טיסה PX4 במודול קומפקטי אחד.
-
מחליף ישירות את בקרי הטיסה המסורתיים, מזעור מורכבות המערכת.
-
-
מבנה קל משקל במיוחד
-
שוקל בלבד 15 גרם, הפחתת מטען המזל"ט הכולל ושיפור זמן הטיסה.
-
אידיאלי עבור מל"טים קלים, מל"טים בעלי כנף קבועה, ומטוסי FPV קטנים.
-
-
בקרת טיסה מובנית PX4
-
מבוסס על קושחת PX4 בקוד פתוח, תומך ב-GPS, פרוטוקול מקלט CRSF, וטלמטריה רגילה.
-
מציע יציבות טיסה מתקדמת, ניווט בנקודת ציון, ופונקציות החזרה הביתה.
-
-
מעקב אחר אובייקטים בינה מלאכותית
-
זיהוי ונעילה בזמן אמת עבור כלי רכב (300-400 מ') ו בני אדם (150-200 מ').
-
אלגוריתם חכם תומך במעקב אחר יעדים דינמי במהירויות של עד 50-70 קמ"ש.
-
מתקן אוטומטית את מיקום הטיסה כאשר האובייקט זז מהמרכז (מצב נעילה רב תיקון).
-
-
התקנה פשוטה & מִבצָע
-
תחליף Plug-and-Play ללוחות בקרת טיסה רגילים.
-
תומך מצלמות אנלוגיות של CVBS ו פלט וידאו NTSC/PAL, תואם לרוב הגדרות FPV.
-
אין צורך בהכשרה נוספת או בכיול - מוכן לשימוש מחוץ לקופסה.
-
-
צריכת חשמל נמוכה
-
צורכת בלבד 2 וואט, מתאים למערכות חשמל קומפקטיות באמצעות 4S–8S LiPo סוללות.
-
ביצועים יעילים מבטיחים זמן פעולת מזל"ט ארוך יותר.
-
-
עמיד ואמין
-
טווח טמפרטורות תפעוליות: -25° C עד +85 מעלות צלזיוס, הבטחת אמינות בסביבות קשות.
-
עוצב עם שבב AI בעל ביצועים גבוהים ומעגל ניהול חשמל יציב.
-
-
מצבי AI מתקדמים
-
מצב נעילה מרכזית: מרכז אוטומטית את המטרה הנעילה במסגרת.
-
נעילה עם Multi-Correction: מתאים את המסלול באופן דינמי כאשר המטרה נעה.
-
-
תאימות רחבה
-
עובד עם רוב רחפני FPV, כנף קבועה, ופלטפורמות ריבוי רוטור.
-
תומך במודול GPS חיצוני לסיוע טיסה מבוסס מיקום.
-
מפרטים
| פָּרָמֶטֶר | תאור |
|---|---|
| קושחת בקרת טיסה מובנית | PX4 |
| מִשׁקָל | 15 g |
| טווח יעד נעילת בינה מלאכותית | רֶכֶב: 300-400 מ'; אֶנוֹשִׁי: 150-200 מ' |
| מתח פעולה | 4סוללת S–8S LiPo |
| צריכת חשמל | 2 W |
| אורך מוקד | 4 מ"מ - 6 מ"מ |
| שדה ראיה (FOV) | 66° × 40° |
| מינימום פיקסל מעקב | 10 × 10 פיקסלים |
| מהירות מעקב יעד דינמית | 50-70 קמ"ש |
| מצב תפעול בינה מלאכותית | נעילה מרכזית; נעילה עם תיקון מרובה |
| פורמט פלט וידאו | NTSC / יָדִיד |
| סוג מצלמה נתמך | מצלמה אנלוגית CVBS |
| תמיכה ב-GPS | כן |
| פרוטוקול מקלט רדיו | CRSF |
| טמפרטורת פעולה | -25°C ~ +85°C |
| ממדים | עיצוב משולב קומפקטי, מבנה PCB קל משקל |
אמצעי זהירות
א. תומך בזוויות התקנת מצלמה בין 0-30°, עם זווית מומלצת של 10-15 מעלות.
ב. תומך בסוג מצלמה CVBS; פורמטי וידאו נתמכים של CVBS: NTSC (מומלץ בחום) ו-PAL.
ג. תומך באורכי מוקד מ 2.1 מ"מ ל 6 מ"מ; 4 מ"מ מומלץ לאיכות התמונה הטובה ביותר.
ד. לאחר שינוי פורמט המצלמה או הווידאו, אנא הפעל מחדש את בקר הטיסה.
מַקְלֵט: תומך ELRS בלבד.
שידור וידאו: תומך שידור וידאו אנלוגי בלבד.
אסק: תומך פרוטוקול quadrotor DSHOT300.
אפליקציות
-
רחפנים FPV & מירוץ מזל"טים
-
שפר את מודיעין הטיסה ושפר את ביצועי מעקב אחר אובייקט.
-
אפשר לרחפנים לעקוב אוטומטית אחר נושאים נעים במהלך מירוץ במהירות גבוהה.
-
-
צילום אווירי & וידיאוגרפיה
-
שמור על מסגור ממוקד נושא באופן אוטומטי, אפילו בזמן תנועה.
-
אידיאלי לצילום סולו ללא שליטה ידנית במצלמה.
-
-
בִּטָחוֹן & רחפני מעקב
-
משמש במשימות סיור, עוקב אחר מטרות או כלי רכב חשודים.
-
תומך במעקב רציף תחת תאורה וסביבות מגוונות.
-
-
מל"טים חקלאיים
-
עקוב אחר כלי רכב או כוח אדם באדמות חקלאיות למשימות בדיקה וניטור.
-
שימושי באוטומציה לסריקת שטח או ניטור בעלי חיים.
-
-
תַעֲשִׂיָתִי & בדיקת תשתיות
-
עקוב אחר אובייקטים דינמיים כגון כלי רכב נעים במהלך משימות בדיקה.
-
מועיל בשמירה על מיקוד ביעדי מפתח במהלך הטיסה.
-
-
חפש & פעולות הצלה
-
זהה ועקוב אחר בני אדם באופן אוטומטי במשימות חילוץ.
-
מפחית באופן משמעותי את עומס העבודה של המפעיל ומשפר את יעילות המשימה.
-
-
יישומים צבאיים וטקטיים
-
אידיאלי לרחפנים בסיור ומעקב מושכל אחר מטרות נעות.
-
קוֹמפָּקטִי, קל, ומתאים למערכות כטב"ם משובצות.
-
אביזרים אופציונליים
-
מודול GPS – לניווט, מיקום, ותמיכה בחזרה הביתה.
-
מצלמת CVBS ברזולוציה גבוהה - אורך מוקד של 4 מ"מ-6 מ"מ, מותאם למעקב בינה מלאכותית.
-
ערכת תושבת הרכבה - להתקנה מאובטחת על פלטפורמות ריבוי רוטור או כנפיים קבועות.
-
סט כבלים מורחב - לחיווט גמיש בפריסות מזל"ט שונות.
-
מקלט טלמטריה חיצוני (CRSF) - לשילוב עם TBS Crossfire או מערכות תואמות אחרות.
הגדרת מערכת טיפוסית
-
חבר מצלמת CVBS ← חבר את אות הווידאו האנלוגי ישירות למודול המעקב בינה מלאכותית.
-
חבר ספק כוח ← תמיכה בסוללת 4S–8S LiPo (נומינלי 14.8V–29.6V).
-
צרף GPS (אופציונאלי) ← לתיקון נתיב טיסה וחזרה הביתה.
-
מקלט כריכה (CRSF) ← להבטיח תקשורת יציבה בין הבקר למערכת הטיסה.
-
הפעל את מצב מעקב בינה מלאכותית ← בחר במצב נעילה מרכזית או ריבוי תיקון.
-
הפעל את Drone ← המודול ננעל אוטומטית על המטרה שנבחרה ומתאים את הטיסה בהתאם.
שאלות נפוצות (שאלות נפוצות)
ש: Do you support secondary development or adding my own AI model to your boards?
א: מצטער, our boards do not support secondary development. The firmware and system are pre-configured by the manufacturer and are not open for users to modify or install custom AI models.
If you have specific functional requirements, please let us know your application details. We can recommend the most suitable model from our existing products or check with our engineers if any customization is possible.
ש: Does the module come with an FPV camera?
א: לא, the module does not include a camera. It supports input from an חיצוני מצלמה אנלוגית CVBS, which must be purchased separately.
ש: Does the module come with firmware pre-installed?
א: כן, the module comes with PX4 flight control firmware and AI tracking firmware pre-installed. The module is essentially plug-and-play.
- Firmware updates can be performed via micro-USB or serial connection במידת הצורך.
- No separate installation is required for basic operation.
ש: Is the module plug-and-play?
א: כן. Once power, קלט מצלמה, and RC signals are connected according to the instructions, the module is ready to operate without additional calibration.
ש: How can I configure parameters?</s> </s> </s> </s> </s> </s> </s> </s> </s> </s> </s> </s>
א: Users can connect the module to QgroundControl (QGC) to view or adjust PX4 parameters.Everything is preset.
Q1: האם מעקב הבינה המלאכותית יכול לעבוד בתנאי תאורה חלשה או לילה?
A1: המודול מסתמך על ניגודיות חזותית וזיהוי מבוסס פיקסלים, אז תאורה מספקת מומלצת. עם מצלמת CVBS בתאורה נמוכה, מעקב לילה מוגבל אפשרי.
Q2: האם זה יכול לעקוב אחר מטרות מרובות בו זמנית?
A2: הקושחה הנוכחית תומכת בנעילת יעד יחיד. למרות זאת, אלגוריתם המעקב יכול להקצות מחדש את המטרה באופן דינמי אם מזוהים אובייקטים מרובים בתנועה.
Q3: האם נדרש כיול לפני השימוש?
A3: אין צורך בכיול. מודול הבינה המלאכותית מוגדר מראש לפעולת הכנס והפעל. משתמשים צריכים רק לחבר מתח וכניסת וידאו.
Q4: האם זה יכול לעבוד עם מצלמות HD או IP?
A4: הוא תומך באנלוגי כניסת וידאו CVBS בלבד. עבור וידאו HD או IP, יידרש מקודד או ממיר.
ש 5: איך זה מתממשק עם מערכות טיסה אחרות?
A5: בקרת הטיסה המובנית PX4 מאפשרת אינטגרציה עם טלמטריה סטנדרטית, ג'י.פי. אס, ומערכות מקלט CRSF. זה יכול גם לתקשר באמצעות פרוטוקול MAVLink עבור משתמשים מתקדמים.
שאלה 6: מה קורה אם המטרה עוזבת את הפריים?
A6: המערכת תבצע ניתוח תנועה חזוי ותנסה להשיג מחדש את המטרה ברגע שהיא תיכנס מחדש לשדה הראייה של המצלמה.
ש 7: ניתן לשדרוג קושחה?
A7: כן, ניתן לעדכן את קושחת הטיסה PX4 וקושחת מודול הבינה המלאכותית באמצעות ממשק מיקרו-USB או יציאה טורית.
שאלה 8: מה ההבדל בין מודול זה לבין בקר טיסה רגיל?
A8: בקרי טיסה רגילים מנהלים רק את יציבות הרחפנים ואת הניווט, בעוד מודול זה משלב את התכונות הללו עם מעקב ראיית AI בזמן אמת - מציע גם שליטה וגם חתירה מושכלת ליעד.
שאלה 9: איך הוא מתמודד עם מטרות הנעות במהירות?
A9: אלגוריתם AI תומך בחיזוי תנועה עד 70 ק"מ / h. זה מתאים באופן רציף את זוויות הגימבל ואת יחס הרחפנים כדי לשמור על מעקב יציב.
שאלה 10: האם הוא מתאים לשימוש מקצועי או תעשייתי?
A10: בְּהֶחלֵט. המודול מיועד הן לרחפני FPV לצרכנים והן למערכות מל"טים מקצועיות המשמשות במעקב, בְּדִיקָה, ופעולות טקטיות.
מַסְקָנָה
ה מודול מעקב בינה מלאכותית זיהוי חכם כולל בקרת טיסה דו-באחד הוא חידוש של הדור הבא בתחום כלי הטיס הבלתי מאוישים. שילוב זיהוי יעדים מבוסס בינה מלאכותית, מעקב אוטונומי, ו בקרת טיסה PX4 בתוך יחידה קלה במיוחד, זה מפשט באופן דרמטי את עיצוב המל"טים תוך שיפור היכולת.
מחובבי מירוצי מזל"טים ועד למשלבי מל"טים מקצועיים, מודול קומפקטי זה מספק א חסכוני, אינטליגנטי, ואמין פתרון לטיסה אוטונומית ומעקב חזותי בזמן אמת. עיצוב ה-Plug-and-Play שלו, תאימות רחבה, וביצועי AI חזקים הופכים אותו לשדרוג חיוני עבור כל פלטפורמת FPV או מזל"ט חכם.
אם בשביל מל"טים FPV, סיורי אבטחה, אוֹ יישומים תעשייתיים, מודול זה מייצג רף חדש ב מודיעין מזל"ט מונע בינה מלאכותית - הפיכת טיסה רגילה למרדף אינטליגנטי.
הגדרת תחנת בקרה קרקעית עבור לוח בקר טיסה בינה מלאכותית
-
לְהַתְקִין QgroundControl (QGC) במחשב שלך. הורד את זה מ https://qgroundcontrol.com/.
-
לאחר התקנת QGC, חבר את לוח בקר הטיסה למחשב באמצעות יציאת TYPE-C באמצעות כבל USB.
הפעל את תוכנת QGC והמתן עד שסרגל ההתקדמות ישלים את הטעינה (בְּעֵרֶך 20 שניות). - לחץ על לוגו "QGC". בפינה השמאלית העליונה כדי להיכנס ל תפריט תצורה.
- לחץ על תצורת הרכב
- היכנס לתפריט תצורת הרכב
- בחר את "חיישנים" תפריט תצורה, ולכייל את העברת נתונים + טלמטריה הכל בקישור נתונים אחד, העברת נתונים + טלמטריה הכל בקישור נתונים אחד, ו פילוס אופק בהתאמה. להנחיות מפורטות, בבקשה התייחס ל "סרטון עזר 1".
-
כיול שלט רחוק
לחץ כדי להיכנס ל שלט רחוק תפריט תצורה. עם השלט הרחוק מופעל, לחבר את בקר הטיסה למקלט (מקלט מחובר ליציאת RX2), ולאחר מכן בצע את כיול השלט הרחוק. להנחיות מפורטות, בבקשה התייחס ל "סרטון עזר 2". -
הגדר מצבי טיסה, מתג זרוע, ומתג עצירת חירום
-
הגדר את ערוץ החלפת מצב טיסה (כברירת מחדל, מְיוּצָב מצב נבחר; אקרו/ידני מצב זמין גם כן)
הערה:-
בשנת מְיוּצָב מצב, המנועים מתחילים להסתובב לאחר ההפעלה, והמטוס ממריא כאשר מצערת מופעלת.
-
בשנת אקרו מצב, המנועים אינם מסתובבים לאחר ההפעלה; המטוס ממריא מיד עם הפעלת המצערת.
-
-
הגדר את הזרוע (לִפְתוֹחַ) להחליף ערוץ
-
הגדר את הרג החירום (עצירת מנוע) להחליף ערוץ
-
- תצורת סוללה (הערה: תצורה לא נכונה עלולה למנוע מהמטוס להמריא)
-
תצורת מנוע
חבר את הסוללה וכייל את רצף של ארבעת המנועים.
הערה: הסר את המדחפים במהלך תהליך זה כדי למנוע פציעה.
הגדרה ושימוש בפונקציית מעקב בינה מלאכותית
הגדר את מתג AI בשלט הרחוק
-
לְהַקְצוֹת שני ערוצי מתג מתג (10 ו 11) בשלט הרחוק כמתגי בקרת AI.
ה בקר טיסה AI-FC-1 תומך בשני מצבי נעילה:-
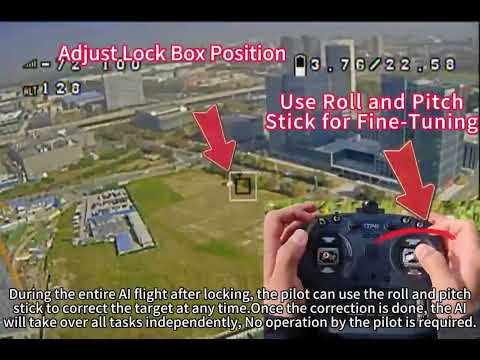
עָרוּץ 10: נעילה או ביטול נעילה חכמה באמצעות תיבת ה-AI, תומך בכוונון עדין של מיקום התיבה התוחמת לאחר הנעילה.
-
עָרוּץ 11: נעילה או ביטול נעילה בכפייה עם הכוונת בתיבה התוחמת, תומך בכוונון עדין של מיקום התיבה התוחמת לאחר הנעילה.
-
-
במהלך טיסת מזל"ט FPV, פשוט יישר את התיבה התוחמת בהזנת הווידאו עם היעד, לאחר מכן החלף אחד מהערוץ 10 אוֹ 11 לפי העדפתך.
-
זה יינעל על המטרה ויתקרב אליה באופן אוטומטי.
-
גם אם האות אבד, בקר הטיסה בינה מלאכותית ימשיך בפעולות הבאות.
-
-
לאחר נעילת AI, ניתן לכוונן את התיבה התוחמת באמצעות ה- גליל/מקלות זפת. להנחיות מפורטות, לִרְאוֹת "סרטון עזר 3".
-
לאחר פתיחת הנעילה, המל"ט יחזור למצב טיסה לפני הנעילה.
טיפים:
-
החלפת מצבי טיסה במהלך מעקב אחר נעילת בינה מלאכותית תצא מהנעילה.
-
שימוש ב- מתג הרג חירום כאשר הוא נעול יאלץ את המנועים לעצור.
פתרון ל-QGC לא מתחבר לבקר הטיסה
-
התקן את הגרסה האחרונה של QgroundControl (QGC). הורד את זה מ https://qgroundcontrol.com.
-
מחק את תיקיות המטמון של QGC הממוקמות ב:
-
C:\Users\%USERPROFILE%\AppData\Local\QG*** -
C:\Users\%USERPROFILE%\AppData\Local\cache\QG***
-
-
הפעל מחדש את תוכנת QGC.
Why recommend this product
Unlock next‑level aerial intelligence with the AI Tracking Flight Control Module for FPV drones — a cutting‑edge AI flight controller that combines autonomous tracking, smart vision targeting for FPV drones, ו AI object detection module for FPV drones capabilities into one ultra‑lightweight package. Designed as an AI targeting upgrade kit for FPV drones, this all‑in‑one module integrates advanced artificial intelligence algorithms with a PX4‑based flight control system to deliver real‑time FPV drone tracking and responsive target lock behavior without needing separate components.
Weighing just 15 g and engineered for seamless integration with analog CVBS cameras, זֶה FPV AI module empowers pilots and developers to add autonomous subject following and intelligent pursuit to any compatible quadcopter or fixed‑wing UAV. With its built‑in AI engine, the system recognizes, locks, and follows both human and vehicle targets in dynamic environments, making it ideal as an AI‑assisted targeting module for FPV racing drones, aerial cinematography rigs, autonomous inspection drones, or security UAVs.
With simple plug‑and‑play installation, support for GPS/CRSF telemetry, and ultra‑low latency response, זֶה FPV AI tracking module elevates your drone with FPV drone with autonomous tracking and targeting performance — all in a compact, cost‑effective upgrade that replaces traditional flight controllers while boosting flight intelligence and mission versatility.
א ב ג
פוסטים קשורים
Tutorial Video







iVcan.com –
אני משתמש במודול מעקב בינה מלאכותית עם בקרת טיסה משולבת PX4 במשך כמה שבועות, וזה שינה לחלוטין את חווית מזל"ט ה-FPV שלי. ההתקנה הייתה סופר קלה - פשוט חבר אותו וזה עבד מיד. מעקב הבינה המלאכותית מדויק בצורה מרשימה, נעילה על כלי רכב ואנשים בצורה חלקה גם בתנועה מהירה. אני מתרשם במיוחד מכמה קל משקל זה וכמה הטיסה מרגישה יציבה במהלך המעקב. זהו שילוב מושלם של זיהוי חכם ובקרת טיסה, גורם לרחפן שלי להרגיש אוטונומי באמת. מומלץ מאוד!