




AI Tracking Flight Control Module for FPV Drones
AI Tracking Module Intelligent Recognition Including Flight Control Two-in-One for FPV Drones
جدول المحتويات
ملخص
ال AI Tracking Module Intelligent Recognition with Integrated Flight Control is a revolutionary two-in-one solution designed specifically for FPV drones and UAV applications that require autonomous tracking, target recognition, and intelligent control. By combining advanced artificial intelligence algorithms with a built-in PX4-based flight control system, this compact module offers users a powerful yet cost-effective upgrade from traditional flight controllers.
Unlike conventional FPV systems that require multiple components for image tracking, flight stabilization, and navigation, this all-in-one unit integrates AI image recognition, object tracking, و flight control management into a single lightweight 15-gram device. It is ideal for drone developers, system integrators, and hobbyists who demand precision tracking, ultra-low latency response, و ease of installation without the need for complex setup or specialized training.
تدعم الوحدة CVBS analog cameras, making it compatible with a wide range of FPV and surveillance cameras. With its built-in AI engine, it can detect, قفل, and track both human and vehicle targets in real time — maintaining consistent focus even under challenging conditions such as fast movement or changing light. The intelligent tracking system automatically adjusts flight position and orientation based on the locked object, ensuring smooth pursuit.
This AI Tracking Flight Controller is engineered for drone target-following, autonomous inspection, FPV racing enhancement, و tactical applications such as reconnaissance, دورية, and target locking. It represents a new era of compact, فعال, and intelligent UAV control systems.
الميزات الرئيسية
-
Two-in-One Design
-
Integrates AI object tracking and PX4 flight control system in a single compact module.
-
Replaces traditional flight controllers directly, minimizing system complexity.
-
-
Ultra-Lightweight Structure
-
يزن فقط 15 جرام, reducing total drone payload and improving flight time.
-
Ideal for lightweight drones, fixed-wing UAVs, and small FPV aircraft.
-
-
Built-in PX4 Flight Control
-
Based on the open-source PX4 firmware, supporting GPS, CRSF receiver protocol, and standard telemetry.
-
Offers advanced flight stability, waypoint navigation, and return-to-home functions.
-
-
AI Object Tracking
-
Real-time recognition and locking for المركبات (300–400 m) و humans (150–200 m).
-
Intelligent algorithm supports dynamic target tracking at speeds up to 50–70 km/h.
-
Automatically corrects flight position when object moves out of center (multi-correction lock mode).
-
-
Simple Installation & عملية
-
Plug-and-play replacement for ordinary flight control boards.
-
الدعم CVBS analog cameras و NTSC/PAL video output, compatible with most FPV setups.
-
No additional training or calibration required — ready to use out of the box.
-
-
استهلاك منخفض للطاقة
-
Consumes only 2 واتس, suitable for compact power systems using 4S–8S LiPo batteries.
-
Efficient performance ensures longer drone operation time.
-
-
Durable and Reliable
-
Operational temperature range: -25درجة مئوية إلى +85 درجة مئوية, ensuring reliability in harsh environments.
-
Designed with high-performance AI chip and stable power management circuit.
-
-
Advanced AI Modes
-
Central Locking Mode: Automatically centers the locked target in the frame.
-
Lock-in with Multi-Correction: Adjusts trajectory dynamically as target moves.
-
-
Wide Compatibility
-
Works with most FPV drones, ثابتة الجناحين, and multirotor platforms.
-
Supports external GPS module for location-based flight assistance.
-
مواصفات
| معامل | وصف |
|---|---|
| Built-in Flight Control Firmware | بي اكس 4 |
| وزن | 15 ز |
| AI Lock Target Range | Vehicle: 300–400 m; Human: 150–200 m |
| Operation Voltage | 4S–8S LiPo battery |
| استهلاك الطاقة | 2 W |
| البعد البؤري | 4 mm – 6 مم |
| مجال الرؤية (مجال الرؤية) | 66° × 40° |
| Minimum Tracking Pixel | 10 × 10 بكسل |
| Dynamic Target Tracking Speed | 50–70 km/h |
| AI Operation Mode | Central locking; lock with multiple correction |
| Video Output Format | NTSC / صديق |
| Supported Camera Type | كاميرا تناظرية CVBS |
| GPS Support | نعم فعلا |
| Radio Receiver Protocol | CRSF |
| درجة حرارة التشغيل | -25°C ~ +85°C |
| الأبعاد | Compact integrated design, lightweight PCB structure |
احتياطات
أ. Supports camera installation angles from 0–30°, with a recommended angle of 10–15°.
ب. Supports CVBS camera type; supported CVBS video formats: NTSC (strongly recommended) and PAL.
ج. Supports focal lengths from 2.1 mm to 6 مم; 4 mm is recommended for the best image quality.
د. After changing the camera or video format, please restart the flight controller.
المتلقي: الدعم ELRS only.
نقل الفيديو: الدعم analog video transmission only.
ESC: الدعم quadrotor DSHOT300 protocol.
التطبيقات
-
FPV Drones & Racing Drones
-
Enhance flight intelligence and improve object-following performance.
-
Enable drones to automatically track moving subjects during high-speed racing.
-
-
Aerial Photography & Videography
-
Maintain subject-centered framing automatically, even during motion.
-
Ideal for solo shooting without manual camera control.
-
-
الأمان & Surveillance Drones
-
Used in patrolling missions, following suspicious targets or vehicles.
-
Supports continuous tracking under varied lighting and environments.
-
-
Agricultural Drones
-
Track vehicles or personnel in farmland for inspection and monitoring tasks.
-
Useful in automation for area scanning or livestock monitoring.
-
-
صناعي & Infrastructure Inspection
-
Track dynamic objects such as moving vehicles during inspection missions.
-
Helpful in maintaining focus on key targets during flight.
-
-
بحث & Rescue Operations
-
Detect and follow humans automatically in rescue missions.
-
Significantly reduces operator workload and improves mission efficiency.
-
-
Military and Tactical Applications
-
Ideal for reconnaissance drones and intelligent tracking of moving targets.
-
مدمج, خفيفة الوزن, and suitable for embedded UAV systems.
-
Optional Accessories
-
وحدة نظام تحديد المواقع – For navigation, تحديد المواقع, and return-to-home support.
-
High-Resolution CVBS Camera – 4mm–6mm focal length, optimized for AI tracking.
-
Mounting Bracket Kit – For secure installation on multirotor or fixed-wing platforms.
-
Extended Cable Set – For flexible wiring in different drone layouts.
-
External Telemetry Receiver (CRSF) – To integrate with TBS Crossfire or other compatible systems.
Typical System Setup
-
Connect CVBS Camera → Plug the analog video signal directly into the AI Tracking Module.
-
Connect Power Supply → Support 4S–8S LiPo battery (nominal 14.8V–29.6V).
-
Attach GPS (خياري) → For flight path correction and return-to-home.
-
Bind Receiver (CRSF) → Ensure stable communication between controller and flight system.
-
Activate AI Tracking Mode → Choose central lock or multi-correction mode.
-
Launch Drone → The module automatically locks onto the selected target and adjusts flight accordingly.
الأسئلة المتداولة (التعليمات)
س: Do you support secondary development or adding my own AI model to your boards?
أ: آسف, our boards do not support secondary development. The firmware and system are pre-configured by the manufacturer and are not open for users to modify or install custom AI models.
If you have specific functional requirements, please let us know your application details. We can recommend the most suitable model from our existing products or check with our engineers if any customization is possible.
س: Does the module come with an FPV camera?
أ: لا, the module does not include a camera. It supports input from an خارجي كاميرا تناظرية CVBS, which must be purchased separately.
س: Does the module come with firmware pre-installed?
أ: نعم فعلا, the module comes with PX4 flight control firmware and AI tracking firmware pre-installed. The module is essentially plug-and-play.
- Firmware updates can be performed via micro-USB or serial connection if needed.
- No separate installation is required for basic operation.
س: Is the module plug-and-play?
أ: نعم فعلا. Once power, إدخال الكاميرا, and RC signals are connected according to the instructions, the module is ready to operate without additional calibration.
س: How can I configure parameters?
أ: Users can connect the module to QGroundControl (QGC) to view or adjust PX4 parameters.Everything is preset.
س1: Can the AI tracking work in low light or night conditions?
A1: The module relies on visual contrast and pixel-based recognition, so adequate lighting is recommended. With a low-light CVBS camera, limited night tracking is possible.
Q2: Can it track multiple targets simultaneously?
A2: The current firmware supports single-target locking. لكن, the tracking algorithm can dynamically reassign the target if multiple objects are detected in motion.
س3: Is calibration required before use?
A3: No calibration is needed. The AI module is pre-configured for plug-and-play operation. Users only need to connect power and video input.
س 4: Can it work with HD or IP cameras?
A4: It supports analog CVBS video input only. For HD or IP video, an encoder or converter would be required.
س5: How does it interface with other flight systems?
A5: The built-in PX4 flight control allows integration with standard telemetry, نظام تحديد المواقع, and CRSF receiver systems. It can also communicate via MAVLink protocol for advanced users.
س6: What happens if the target leaves the frame?
أ6: The system will perform predictive movement analysis and attempt to reacquire the target once it re-enters the camera’s field of view.
س7: Is firmware upgradable?
أ7: نعم فعلا, the PX4 flight firmware and AI module firmware can be updated via a micro-USB interface or serial port.
Q8: What is the difference between this module and a regular flight controller?
أ8: Regular flight controllers only manage drone stability and navigation, while this module combines those features with real-time AI vision tracking — offering both control and intelligent target pursuit.
س9: How does it handle fast-moving targets?
A9: The AI algorithm supports motion prediction up to 70 كم/ساعة. It continuously adjusts gimbal angles and drone attitude to maintain stable tracking.
س10: Is it suitable for professional or industrial use?
A10: قطعاً. The module is designed for both consumer FPV drones and professional UAV systems used in surveillance, تقتيش, والعمليات التكتيكية.
خاتمة
ال AI Tracking Module Intelligent Recognition Including Flight Control Two-in-One is a next-generation innovation in the field of unmanned aerial vehicles. Combining AI-based target recognition, autonomous tracking, و PX4 flight control within a single ultra-light unit, it dramatically simplifies UAV design while enhancing capability.
From drone racing enthusiasts to professional UAV integrators, this compact module provides a cost-effective, intelligent, وموثوقة solution for autonomous flight and real-time visual tracking. Its plug-and-play design, broad compatibility, and robust AI performance make it an essential upgrade for any FPV or smart drone platform.
Whether for طائرات بدون طيار FPV, دوريات أمنية, أو industrial applications, this module represents a new benchmark in AI-driven drone intelligence — transforming ordinary flight into intelligent pursuit.
Ground control station setup for AI flight controller board
-
ثَبَّتَ QGroundControl (QGC) على جهاز الكمبيوتر الخاص بك. Download it from https://qgroundcontrol.com/.
-
After installing QGC, connect the flight controller board to the computer via the TYPE-C port using a USB cable.
Launch the QGC software and wait for the progress bar to complete loading (تقريبًا 20 ثواني). - انقر فوق “QGC” logo in the upper-left corner to enter the configuration menu.
- Click the vehicle configuration
- Enter the vehicle configuration menu
- Select the “Sensors” configuration menu, and calibrate the gyroscope, accelerometer, و horizon leveling على التوالى. For detailed instructions, يرجى الرجوع إلى “Reference Video 1”.
-
Remote Controller Calibration
Click to enter the جهاز التحكم عن بعد configuration menu. With the remote controller powered on, connect the flight controller to the receiver (receiver connected to the RX2 port), and then perform the remote controller calibration. For detailed instructions, يرجى الرجوع إلى “Reference Video 2”. -
Configure Flight Modes, Arm Switch, and Emergency Stop Switch
-
Set the flight mode switch channel (by default, Stabilized mode is selected; Acro/Manual mode is also available)
ملحوظة:-
في Stabilized وضع, the motors start spinning after arming, and the aircraft takes off when throttle is applied.
-
في Acro وضع, the motors do not spin after arming; the aircraft takes off immediately when throttle is applied.
-
-
Set the Arm (unlock) switch channel
-
Set the Emergency Kill (motor stop) switch channel
-
- Battery Configuration (ملحوظة: Incorrect configuration may prevent the aircraft from taking off)
-
Motor Configuration
Connect the battery and calibrate the sequence of the four motors.
ملحوظة: Remove the propellers during this process to avoid injury.
AI Tracking Function Setup and Usage
Configure AI Switch on the Remote Controller
-
Assign two toggle switch channels (10 و 11) on the remote controller as AI control switches.
ال AI-FC-1 flight controller supports two lock modes:-
قناة 10: Smart lock or unlock with the AI bounding box, supports fine-tuning the bounding box position after locking.
-
قناة 11: Forced lock or unlock with the crosshair in the bounding box, supports fine-tuning the bounding box position after locking.
-
-
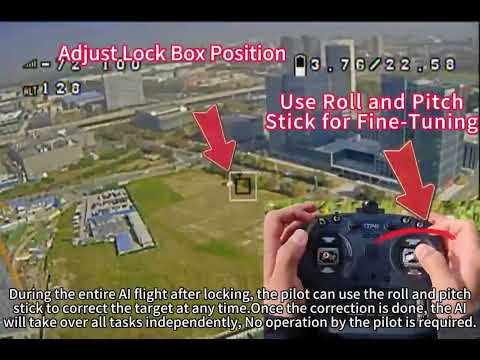
During FPV drone flight, simply align the bounding box in the video feed with the target, then toggle either channel 10 أو 11 according to your preference.
-
This will lock onto the target and approach it automatically.
-
Even if the signal is lost, the AI flight controller will continue the subsequent actions.
-
-
After AI lock, the bounding box can be fine-tuned using the roll/pitch sticks. For detailed instructions, يرى “Reference Video 3”.
-
After unlocking, the drone will return to the flight mode prior to locking.
نصائح:
-
Switching flight modes during AI lock tracking will also exit the lock.
-
Using the Emergency Kill switch while locked will force the motors to stop.
Solution for QGC Not Connecting to the Flight Controller
-
Install the latest version of QGroundControl (QGC). Download it from https://qgroundcontrol.com.
-
Delete the QGC cache folders located at:
-
C:\Users\%USERPROFILE%\AppData\Local\QG*** -
C:\Users\%USERPROFILE%\AppData\Local\cache\QG***
-
-
Restart the QGC software.
Why recommend this product
Unlock next‑level aerial intelligence with the AI Tracking Flight Control Module for FPV drones — a cutting‑edge AI flight controller that combines autonomous tracking, smart vision targeting for FPV drones, و AI object detection module for FPV drones capabilities into one ultra‑lightweight package. Designed as an AI targeting upgrade kit for FPV drones, this all‑in‑one module integrates advanced artificial intelligence algorithms with a PX4‑based flight control system to deliver real‑time FPV drone tracking and responsive target lock behavior without needing separate components.
Weighing just 15 g and engineered for seamless integration with analog CVBS cameras, هذا FPV AI module empowers pilots and developers to add autonomous subject following and intelligent pursuit to any compatible quadcopter or fixed‑wing UAV. With its built‑in AI engine, the system recognizes, locks, and follows both human and vehicle targets in dynamic environments, making it ideal as an AI‑assisted targeting module for FPV racing drones, aerial cinematography rigs, autonomous inspection drones, or security UAVs.
With simple plug‑and‑play installation, support for GPS/CRSF telemetry, and ultra‑low latency response, هذا FPV AI tracking module elevates your drone with FPV drone with autonomous tracking and targeting performance — all in a compact, cost‑effective upgrade that replaces traditional flight controllers while boosting flight intelligence and mission versatility.
abc
المشاركات ذات الصلة
Tutorial Video











iVcan.com –
I’ve been using the AI Tracking Module with integrated PX4 flight control for a few weeks, and it has completely transformed my FPV drone experience. The installation was super easy — just plug it in and it worked immediately. The AI tracking is impressively accurate, locking onto vehicles and people smoothly even when moving fast. I’m especially impressed by how lightweight it is and how stable the flight feels during tracking. It’s a perfect blend of smart recognition and flight control, making my drone feel truly autonomous. موصى به للغاية!