


소개
많은 사용자가 양방향 무선 링크를 사용하여 UAV를 지상 컴퓨터에 연결합니다. TX900 Mission Planner를 운영하기 위해. 에어사이드는 TTL을 통해 비행 컨트롤러에 연결됩니다., 접지측은 직렬-네트워크 방식을 사용하지만.
사용자가 링크 기본 매개변수를 수정하면 일부 연결 문제가 발생합니다.. 안정적인 작동을 보장하려면, 기본 매개변수 설정을 사용하는 것이 중요합니다.. 이 가이드에서는, 기본 구성의 단계별 스크린샷을 제공합니다., 설정을 정확히 일치시킬 수 있도록.
사용자의 컴퓨터 IP 주소는 192.168.43.xxx입니다., 그래서 우리는 그의 컴퓨터의 IP 주소에 맞게 설정을 수정합니다..
또 다른 소개글입니다.
https://ivcan.com/p/video-telemetry-downlink-flight-control-commands-uplink/
유튜브에 운영영상 있어요.

단계 1: 에어사이드 (UAV 192.168.1.12, 액세스 노드) 설정
UAV는 TTL을 통해 무선 모듈에 연결됩니다.. 스크린샷 예:
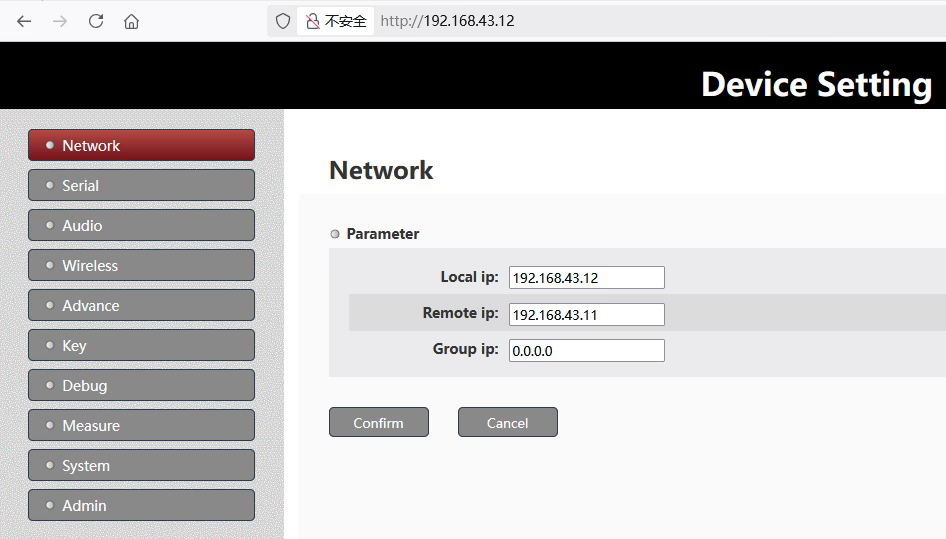


단계 2: 접지측 (PC, 192.168.1.11, 중앙 노드) 설정
지상에, Mission Planner를 실행하는 PC를 연결하는 데 직렬-네트워크 변환이 사용됩니다.. 스크린샷 예



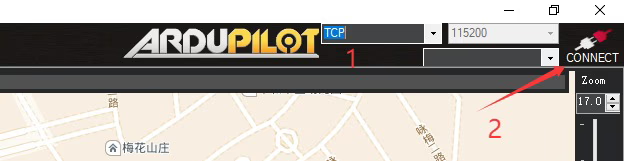
단계 3: 지상에서 MissionPlanner.exe 사용

단계 4: 매개변수 정렬
성공적인 연결을 보장하려면:
- 에어 측과 그라운드 측의 각 매개변수 페이지는 기본 구성과 일치해야 합니다..
- 엔지니어가 조언하지 않는 한 TDD 시간 슬롯 비율이나 전송 속도를 변경하지 마십시오..
- 직렬-네트워크 어댑터의 네트워크 설정 및 IP 주소가 UAV 모듈과 일치하는지 확인하십시오..
단계 5: 연결 테스트
기본 매개변수를 확인한 후:
- UAV와 지상국 모두 전원 켜기.
- 지상 PC에서 Mission Planner 열기.
- 무선 링크를 통해 UAV에 연결.
- 연결이 불안정한 경우, 양쪽의 매개변수를 다시 확인하고 기본값과 정확히 일치하는지 확인하세요..
주의
만약에, 스크린샷에 따라 웹 매개변수를 구성한 후, 원격 측정 데이터를 여전히 수신할 수 없습니다, 그런 다음 공기 측 노드의 D3 포트와 고객의 비행 컨트롤러 사이의 직렬 연결을 다시 확인하십시오..
다음을 확인하세요.:
- 전압 레벨이 호환됩니다..
- Tx 및 Rx 라인은 반전되지 않습니다..
매개변수가 적용되도록 하려면 에어 측 및 그라운드 측 노드 모두의 전원을 껐다가 켜야 합니다..
공기 측 노드의 D3 포트와 비행 컨트롤러 사이의 직렬 연결을 확인하도록 요청하십시오., Tx와 Rx가 반전되지 않았는지 확인.
핑을 시도해보세요 192.168.43.12 PC에서 응답하는지 확인하세요.. 이는 무선 링크가 제대로 작동하는지 확인하는 데 도움이 됩니다..
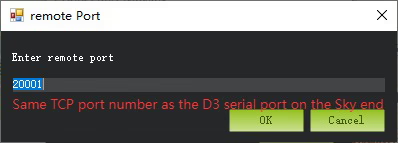
현재, 고객의 에어측 노드 인터페이스는 모두로 설정됩니다., 이는 TCP 서버를 실행하고 있음을 의미합니다. (포트 20001) 또한 UDP를 통해 IP 주소의 PC로 직렬 데이터를 적극적으로 전송합니다. 192.168.43.2, UDP 포트 8090.
이 구성을 기반으로, 지상의 MissionPlanner.exe는 다음 방법 중 하나로 원격 측정 데이터에 액세스할 수 있습니다.:
TCP 모드: 에어사이드 노드의 IP에 연결 (192.168.43.12) 및 TCP 포트 (20001), 지점의 스크린샷에 표시된 대로 3 ~ 위에.
UDP 모드: PC의 IP에서 UDP를 통해 원격 측정 데이터 수신 (192.168.43.2) 그리고 항구 (8090).
고객은 네트워크 디버깅 도구를 열어 비행 컨트롤러의 원격 측정 데이터가 수신되는지 확인할 수도 있습니다..


메모: 내 PC의 IP 주소는 192.168.43.115, ~ 아니다 192.168.43.2 고객의 설정과 마찬가지로.
자주하는 질문
큐: 고객은 두 장치(공중 장치 하나와 지상 장치 하나)가 전원을 켰을 때 서로 다른 LED 동작을 표시하는 이유를 물었습니다.. 하나의 LED가 항상 켜져 있음, 다른 하나는 깜박이는 동안. 왜 그럴까요??
에이: 드론 측이 액세스 노드입니다., 접지측이 중앙 노드입니다..

노드 LED: 노드 유형 표시기의 파란색 표시등: 1. 장치가 중앙 노드로 작동할 때 계속 켜져 있음(지상 유닛, 192.168.1.11). 2. 장치가 액세스 노드로 작동할 때 깜박이는 빛 (공중 유닛, 192.168.1.12).
결론
UAV와 지상 PC 간의 안정적인 양방향 통신을 위해서는 기본 매개변수를 사용하는 것이 필수적입니다.. 링크를 올바르게 구성하려면 이 게시물의 스크린샷과 지침을 따르세요.. 변경 사항이 있으면 Mission Planner가 성공적으로 작동하지 못할 수 있습니다..
질문하기
응답해 주셔서 감사합니다. ✨