


正確配置 UART 介面和通訊模式,將無人機無線鏈路與飛行控制器連接, 遙控器, 遙測系統, 和 SBUS 設備可靠.
Table of Contents
1. 系統概述
這 2024 無人機無線視訊資料遙測收發模組 平台包含兩個獨立的硬體子系統:
- 無線電鏈路系統
- 介面互動系統

每個子系統使用不同的IP位址範圍:
| 系統 | 目的 | 預設IP範圍 |
|---|---|---|
| 介面互動系統 | 面向客戶的乙太網路介面 | 192.168.1.x (例子: 192.168.1.11) |
| 無線電鏈路系統 | 內部無線通訊 | 192.168.168.x (例子: 192.168.168.11) |
UART資源分配
The external serial interfaces are distributed across the two systems as follows:
| 介面 | Located In |
|---|---|
| 串口1 | 無線電鏈路系統 |
| 串口2 | 介面互動系統 |
| 系統匯流排 | 介面互動系統 |
Because UART1 belongs to the wireless radio link subsystem, its behavior and configuration differ from UART2 and SBUS.
2. 如何設定無人機無線鏈路的UART——UART1配置
UART1 supports the following operating modes:
- Transparent Mode
- UDP Mode
- TCP Client Mode
- TCP Server Mode
2.1 UART1 透明模式
In Transparent Mode, UART1 works like a wireless serial broadcast channel.

Any serial data received on one node will be transparently forwarded to other nodes within the wireless radio network.
Configuration Requirements
Only the baud rate needs to be configured.
典型應用
- Wireless serial passthrough
- Telemetry broadcasting
- Transparent data forwarding between radio nodes
2.2 UART1 UDP 模式
In UDP Mode, UART1 functions as a Serial-to-UDP gateway.
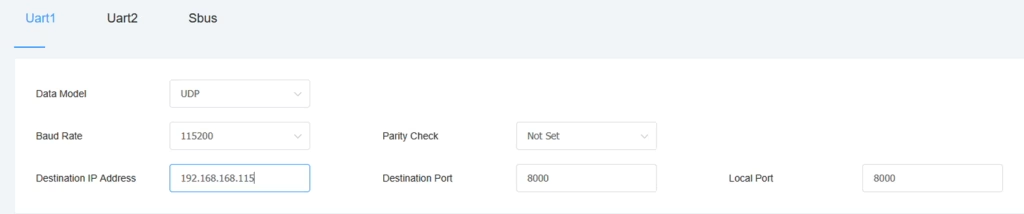
所需參數
配置以下設定:
- 波特率
- 平價
- UDP 目的 IP 位址
- UDP 目標端口
- 本地監聽端口
(預設與目的連接埠相同)
重要提示
由於無線電鏈路系統總是使用 192.168.168.x 子網, 目標 IP 位址也必須在此子網路內.
例子:
192.168.168.115
典型應用
- 透過IP網路的串行設備通信
- 遙測轉發
- 遠端感測器資料傳輸
2.3 UART1 TCP 用戶端模式
TCP 用戶端模式, UART1 functions as a 串口轉TCP轉換器 並主動連接到遠端TCP伺服器.

所需參數
配置:
- 波特率
- 平價
- 遠端 TCP 伺服器 IP 位址
- 遠端 TCP 伺服器連接埠號
重要提示
遠端 TCP 伺服器 IP 也必須屬於 192.168.168.x 子網.
例子:
192.168.168.115
典型應用
- 將板載串行設備連接到中央伺服器
- 透過 TCP/IP 進行長距離串行通訊
2.4 UART1 TCP 伺服器模式
TCP伺服器模式, UART1充當本機TCP伺服器並允許遠端TCP客戶端連接.

所需參數
配置:
- 波特率
- 平價
- 本地TCP伺服器監聽端口
重要提示
- 遠端 TCP 用戶端應使用範圍內的 IP 位址
192.168.168.x子網. - 港口
8000無法使用,因為它是系統內部保留的.
典型應用
- PC 到無線電串行通信
- 遠端串口調試
- 地面站接入
3. 如何配置 UART2
UART2支援以下模式:
- UDP Mode
- TCP Server Mode
- 兩種模式 (UDP協定 + TCP伺服器)
與 UART1 不同, UART2屬於介面交互子系統.
3.1 UART2 UDP 模式
In UDP Mode, UART2 作為串行轉 UDP 網關運行.

所需參數
配置:
- 波特率
- 平價
- UDP 目的 IP 位址
- UDP 目標端口
- 本地監聽端口
進階參數
最大間隙
用於檢測串列資料幀的結束.
如果在配置的時間內沒有收到串列數據 (毫秒), 系統認為當前幀完整並透過網路轉發它.
最大資料包數
定義最大資料包大小 (位元組) 用於網路傳輸.
這可以防止封包超出乙太網路 MTU 限制.
推薦
預設值適用於大多數應用,通常不需要修改.
典型應用
- 乙太網路轉串口資料轉發
- 遙測傳輸
- 感測器網路
3.2 UART2 TCP 伺服器模式
在此模式下, UART2 用作串行到 TCP 伺服器網關.

所需參數
配置:
- 波特率
- 平價
- TCP伺服器監聽連接埠
典型應用
- 遠端串行終端存取
- 基於 TCP 的控制系統
3.3 UART2 兩種模式
兩種模式結合:
- UDP轉發
- TCP 伺服器功能
此模式支援同時UDP資料傳輸和TCP客戶端訪問.

典型應用
- 多客戶端訪問
- 混合遙測系統
- 同時監測和控制
4. 如何配置SBUS
SBUS 介面設計用於 SBUS網路傳輸, 類似UART1透明模式.

主要用於無線SBUS直通應用.
4.1 推薦配置——UDP模式
對於正常操作, 推薦UDP模式.
配置方法
放:
- 目的IP位址
- 目的港
匹配另一個無線節點的監聽IP和端口.
遠程節點應相應地反向配置.
這使得兩個無線電節點之間能夠進行雙向SBUS透明傳輸.
典型應用
- 遙控訊號傳輸
- 無人機飛控通訊
- 無線SBUS中繼
大多數情況下, 用戶只需要單向SBUS資料傳輸.
4.2 SBUS TCP 伺服器模式
SBUS也可以在TCP伺服器模式下運行.
在此模式下, PC TCP客戶端可以直接存取SBUS介面.
典型應用
開發人員可以建立自訂 PC 地面站軟體:
- 發送SBUS控制數據
- 遠端控制無人機
- 進行調試和模擬
此模式不太常用,但對於高級整合和軟體開發很有用.
5. 概括
本文檔介紹如何在DLA平台上設定無人機無線連結系統的UART, including:
- UART1配置
- UART2配置
- SBUS網路傳輸
- UDP/TCP工作模式
- 透明串行通信
透過選擇正確的 UART 模式和網路配置, 使用者可以輕鬆實現:
地面站集成
Wireless serial passthrough
TCP/UDP串列網絡
SBUS遙控傳輸
無人機遙測通信

TX RX Module

TX RX Module

Wireless Video Transmission
Ask A Question
感謝你的回應。 ✨