






ဒရုန်း Mavlink ပရိုတိုကောဖြင့် အလိုအလျောက် ခြေရာခံခြင်း အင်တင်နာ စနစ် ခြေရာခံ အင်တင်နာ
ဒရုန်းဗီဒီယိုထုတ်လွှင့်သူ Vcan1703 အတွက် ဒရုန်း Mavlink ပရိုတိုကော AAT ပါသည့် အလိုအလျောက် ခြေရာခံခြင်း အင်တင်နာ စနစ် ခြေရာခံ အင်တင်နာ
မာတိကာ
အဘယ်ကြောင့်သင်အလိုအလျောက်ခြေရာခံခြင်းအင်တင်နာလိုအပ်ပါတယ်?
ဒရုန်းသည် ကောင်းကင်တွင် အကွာအဝေး ပျံသန်းနေချိန်တွင် သာမန်မျက်စိဖြင့် မမြင်နိုင်ပေ။. ကြိုးမဲ့ဗီဒီယိုထုတ်လွှင့်ခြင်းအချက်ပြမှုသည် ယခုအချိန်တွင် အပြင်းထန်ဆုံးဖြစ်ကြောင်း သေချာစေရန်, အလိုအလျောက်ခြေရာခံနိုင်သော အင်တင်နာတစ်ခု လိုအပ်သည်။. ဤအင်တင်နာသည် လှည့်နေစဉ် အလိုအလျောက် ရှာဖွေနိုင်သည်။. အကောင်းဆုံးအချက်ပြမှုရရန်, ဒရုန်းကို နေရာချထားပြီး အင်တင်နာလက်ခံသည့်မျက်နှာပြင်ကို ဒရုန်းကို အမြဲတမ်း မျက်နှာမူထားပါ။.
![]()
gimbal နှင့်အလိုအလျောက်ခြေရာခံခြင်းအင်တင်နာသည် UAV directional panel antenna system အတွက်ဒီဇိုင်းပြုလုပ်ထားသည်. Directal Panel Antennas သည် Omnidireen- antennas ထက်ပိုမိုမြင့်မားသောအမြတ်ရှိသည်, သို့သော်မြင့်မားသောရရှိသော directional panel ကို Panel Antennas သည်ကျဉ်းမြောင်းသောထိရောက်သောထောင့်ဖြင့်လိုက်ပါသွားလေ့ရှိသည်. ဘာဖြစ်လို့လဲဆိုတော့မောင်းသူမဲ့လေယာဉ်၏အချိန်နှင့်တပြေးညီအနေအထားသည်အမြဲတမ်းပြောင်းလဲနေသည်, မြေပြင် - အမြတ်အစွန်းအန်ဒင်းအင်တင်နာကိုအချိန်နှင့်တပြေးညီချိန်ညှိရန်လိုအပ်သည်. ကျွန်ုပ်တို့၏အလိုအလျောက် tracker Antenna သည် UAV ပျံသန်းသည့်အခါ ဦး တည်ရာ panel ကိုအင်တင်နာသည်အကောင်းဆုံးလမ်းညွှန်မှုနှင့်ထောင့်များတွင်အကောင်းဆုံးလမ်းညွှန်မှုနှင့်လက်ခံရန်ခက်ခဲကြောင်းပြ problem နာကိုဖြေရှင်းရန်ဖြစ်သည်. ![]()
gimbal နှင့်ကျွန်ုပ်တို့၏အလိုအလျောက်ခြေရာခံခြင်းအင်တင်နာသည်လတ်တီတွဒ်ကိုရရှိခဲ့သည်, လောင်ဂျီတွဒ်, နှင့်ခြေရာခံပစ်မှတ်၏အမြင့် (မောင်းသူ) ကြိုးမဲ့ဒေတာလင့်ခ်မှတဆင့်, နှင့်မောင်းသူမဲ့လေယာဉ်သည်ယေဘုယျအားဖြင့်၎င်းကိုအသုံးပြုသည် Mavlink protocol မောင်းသူမဲ့လေယာဉ်၏သတင်းအချက်အလက်ကိုထုတ်လွှင့်ရန် (လတ်တီတွဒ်နှင့်လောင်ဂျီတွဒ်နှင့်အမြင့်အပါအဝငျ) အဆုံးမှာကြိုးမဲ့ဒေတာ link မှတဆင့်မြေပြင်သို့, ကျနော်တို့သာလတ်တီတွဒ်ဝေမျှဖို့လိုအပ်ပါတယ်, လောင်ဂျီတွဒ်, နှင့် Real-time အလိုအလျောက်ခြေရာခံခြင်းကိုနားလည်သဘောပေါက်ရန်ကျွန်ုပ်တို့၏အလိုအလျောက်ခြေရာခံခြင်း gimbal ကိုအမြင့်သတင်းအချက်အလက်.
![]()
ကျွန်ုပ်တို့၏အလိုအလျောက်ခြေရာခံခြင်း gimbal သည်လက်ရှိလောင်ဂျီတွဒ်ကိုရရှိသည်, လတီ္တတွဒ်, serial port မှတဆင့်ကြိုးမဲ့ဒေတာ link ကိုမြေပြင်အဆုံးမှလေယာဉ်၏အမြင့်သတင်းအချက်အလက် (AAT1 နှင့် Data link ၏ serial port ၏ tx signal ကိုမျှဝေပါ), ပြီးတော့အချိန်နှင့်တပြေးညီအလိုအလျောက်ခြေရာခံခြင်းနှင့်အချိန်မှန်ချိန်ညှိခြင်းနှင့်အချိန်မှန်ညှိနှိုင်းမှုကိုအလိုအလျောက်အလိုအလျောက် “aligns” ကောင်းကင်၌ UAV, ဒါကြောင့် directional panel ကိုအင်တင်နာသည်ပေးပို့ခြင်းနှင့်လက်ခံခြင်းအတွက်အကောင်းဆုံးလမ်းညွှန်မှုနှင့်ထောင့်ကိုအမြဲတမ်းထိန်းသိမ်းထားသည်.
![]()
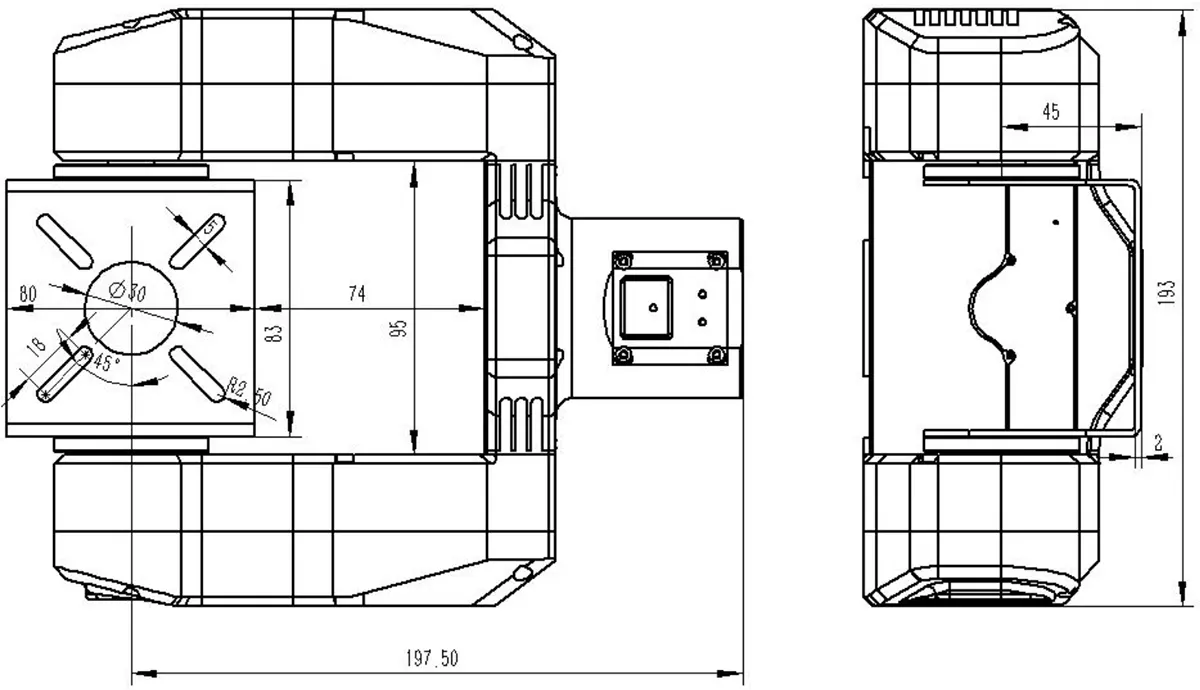
ခြေရာခံနိုင်စွမ်း
- အများဆုံး အလျားလိုက် လှည့်ထောင့်: အကန့်အသတ်မဲ့ / 450 °မှ configurable
- အမြင့်ဆုံး စေးလှည့်ထောင့်: -15° ~ + 135 °
- အများဆုံးအလျားလိုက်အလှည့်မြန်နှုန်း: 300° / sec
- အများဆုံးအစေးအလှည့်မြန်နှုန်း: 60° / sec
- အလျားလိုက်ခြေရာခံခြင်းအမှား: < 0.5°
- အစေးခြေရာခံအမှား: < 0.1°
စွမ်းအင်သုံးစွဲမှုနှင့်အလေးချိန်
- ပျမ်းမျှပါဝါစားသုံးမှု: <15ဒဗလျူ
- အလေးချိန်: 2812 ဂရမ် (အလိုအလျောက်ခြေရာခံ gimbal ၏အသားတင်အလေးချိန်, ပြားချပ်ချပ် panel ကိုအင်တင်နာသီးသိမ်းပိုက်, ပါဝါထောက်ပံ့ရေးဘက်ထရီ, စသည်တို့ကို)
- ဘက်ထရီအလေးချိန်: 292*2= 584 ဂရမ် (လွတ်လပ်သောဘက်ထရီ 760 ဂရမ်), 1.4ဆ Panel Antenna အလေးချိန် 1685 ဂရမ်
- ထမ်းဆောင်ဝန်: 3000 ဂရမ်
- အလုပ်လုပ်အပူချိန်: -20PAL/NTSC အလိုအလျောက် ပြောင်းလဲခြင်း။
interface နှင့် protocol
- ပါဝါထောက်ပံ့ရေးမျက်နှာပြင်: xt60 အထီး, DC12~16V
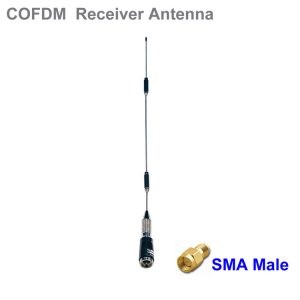
- Antenna Input interface: SMA ပြင်ပထိန်းချုပ်မှုအတွင်းပိုင်းထိန်းချုပ်မှု, output ကို interface ကို: n-type အမျိုးသမီး
![]()
![]()
အသုံးပြုသူလက်စွဲ
ဝင်ရောက်ရန် နှိပ်ပါ။ VCAN1703_USER_MANUAR.PDF

![]()
ဤအော်တို-ခြေရာခံအင်တင်နာကို ဒရုန်းများအတွက် ဒီဇိုင်းထုတ်ထားသည်။, တာဝေးပစ်ကြိုးမဲ့ ဗီဒီယို ထုတ်လွှင့်မှု transceiver transmitters, နှင့် လက်ခံသူများ.
အလိုအလျောက်ခြေရာခံအင်တင်နာနည်းပညာသည် ဒရုန်းကြိုးမဲ့ဗီဒီယိုထုတ်လွှင့်ခြင်းနှင့် လက်ခံကိရိယာစွမ်းဆောင်ရည်အတွက် တော်လှန်တိုးတက်မှုတစ်ခုဖြစ်သည်။.
အမေးအဖြေများ
ဒရုန်းအခြေခံဒေတာလင့်ခ်ပရောဂျက်တွင် အသုံးပြုရန်အတွက် ကျွန်ုပ်တို့သည် သင်၏ အော်တိုအင်တင်နာခြေရာခံစနစ်အား စိတ်ဝင်စားပါသည်။.
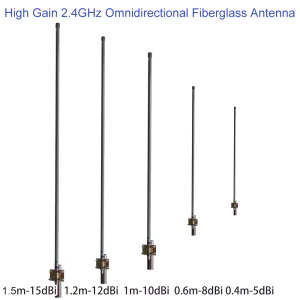
- အင်တင်နာသည် S-band ဖြစ်သင့်သည်။ (2.4 GHz အမြန်နှုန်း)
- အလိုအလျောက်ခြေရာခံခြင်းအင်္ဂါရပ်ရှိသင့်သည်။ (ECEF ဒေတာနှင့်အတူ)
မေးခွန်းလွှာ;
- အင်တင်နာ ဘောင်များသည် အဘယ်နည်း? (အမြတ်, hpbw, စသည်တို့ကို)
- tracker ၏ interface ကဘာလဲ? Tracker ကိုဘယ်လိုထိန်းချုပ်မလဲ။?
- သုညခေါင်းစီးကို မည်သို့ပြုလုပ်ထားသည်။?
- RSSI ခြေရာခံခြင်းလည်း ဖြစ်နိုင်ပါသလား။?
ကျေးဇူးပြု၍ tracker နှင့်ပတ်သက်သောအသေးစိတ်အချက်အလက်များကို ကျွန်ုပ်တို့ထံပေးပို့နိုင်ပါသလား။?








မိုက်ကယ် –
ဤ AAT စနစ်သည် Mavlink တယ်လီမီတာတွင် ပြီးပြည့်စုံသောသော့ကို ပေးသည်။, အနှောင့်အယှက်မရှိဘဲ 15 ကီလိုမီတာကျော်မှ HD ဗီဒီယို feeds များကို ဆက်တိုက်ကြည့်ရှုပါ။. ရှာဖွေရေးနှင့် ကယ်ဆယ်ရေးနှင့် ပိုက်လိုင်းစစ်ဆေးခြင်းအတွက် စံပြဖြစ်သည်။, ၎င်း၏ ခြေရာခံ တိကျမှုမှာပင် မယုံနိုင်လောက်အောင် တိကျပါသည်။ 100 km / h.